





供稿人:钟琪 田小永 发布日期:2017-11-29
目前,3D打印机的分辨率可达到每厘米240个打印单元。这意味着我们可以将10亿个不同材质的小方块打印到70立方厘米的体积内。如此高精度的分辨率可用于直接控制打印零件的微观结构,实现对零件的物理性能的控制,例如密度、强度、给定作用力下的变形形式。但是,对于包含数百亿个打印单元的物体来说,在仅考虑两种材料分布的前提下,预先模拟仿真分析并评估其每一种可能组合的物理性能所需要的计算量也会让人望而却步。
为此,来自CSAIL(麻省理工学院的计算机科学和人工智能实验室)的研究人员开发了一种新的拓扑优化方法,如图1所示。在该研究中,打印零件是由一个个打印单元,也称为体素,堆积而成。
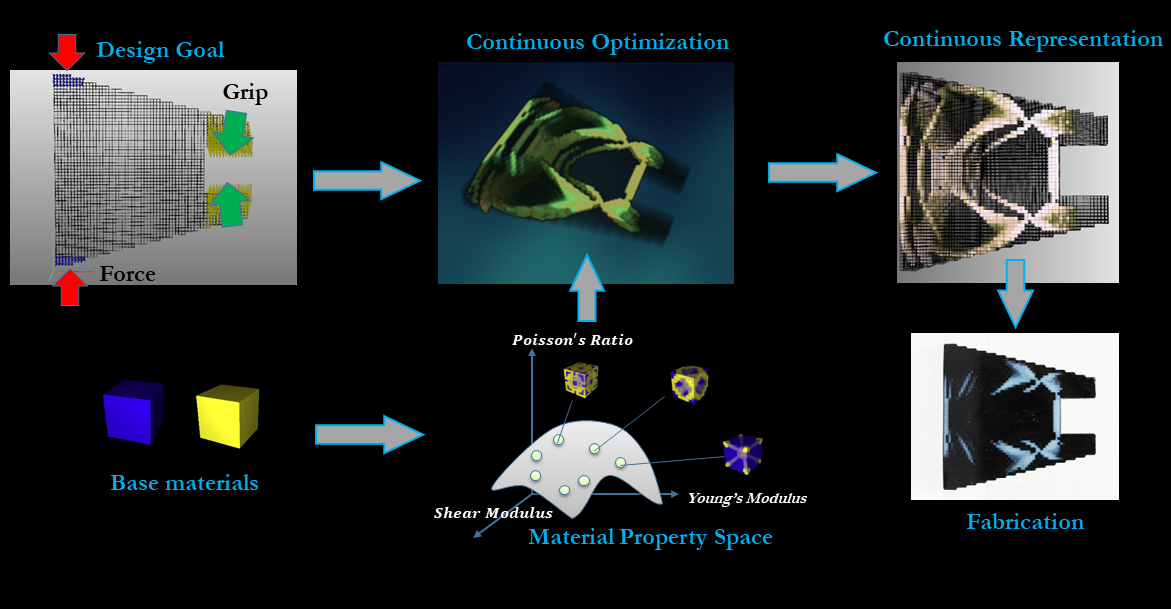
图1 CSAIL提出的拓扑优化设计流程图
研究人员首先演示了微观结构的调整是如何调节零件物理性能的。微观结构的调整是通过调节小立方体集合内两种材料的分布。这两种材料分别是硬质透明树脂和柔软的黑色橡胶材料。该方法对大量由多个打印体素构成的小立方体集合根据物理性能进行分类,如图2所示。而这些小立方体集合可以作为打印过程中更大的构建单元,如同高楼建造中的砖块一样。通过研究人员开发的双尺度拓扑优化算法,程序可从材料数据库中选择具有不同材料性能的小立方体集合,自由地设计出具有不同功能的零件,并可以预先进行仿真分析评估。因此,该方法先对微观尺度进行了实际的物理测量,同时在数据库的支持下对宏观设计进行了高效的仿真分析评估。
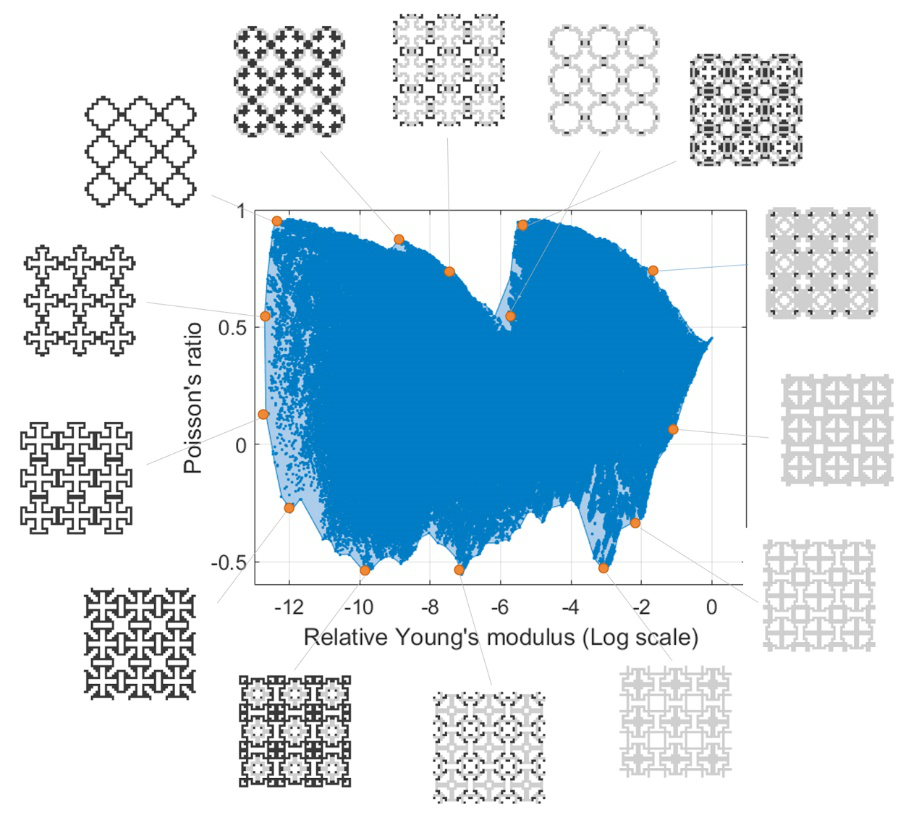
图2 通过优化获得的多材料分布模式,具有不同的杨氏模量和泊松比
在CSAIL工作的博士后Bo Zhu,也是这篇论文的第一作者,他说:“通常来说,人们是不依靠任何系统就可以手工设计出3D打印模型的。但当你想制造更高难度的作品时,例如,你想设计一个刚度超强的椅子,或者设计一个功能齐全、敏捷柔软的机器手的时候,人类的直觉或经验是远远不够的。因此,这个论文的重点就是拓扑优化。它包含了物理和仿真在设计回路中的应用。当前拓扑优化的问题是硬件能力和软件之间存在差距,我们设计的这个系统就填缺了这一空白。”
为此,研究人员用该方法设计了一种柔性机器人抓手和其内部微观结构,如图3所示。当我们像握住钳子一样像两侧用力时,机器人抓手的末端就会被挤压,可以抓住目标物体。
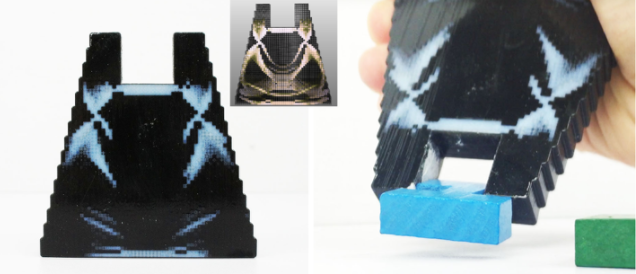
图3利用拓扑优化算法设计的柔性机器人抓手
研究人员同时设计了一种柔性材料制作的仿生“鳐鱼”,如图4所示。通过拓扑优化,将扇动翅膀的运动机制嵌入到材料中。当它的脊柱上两个端点分别收缩和扩张时,鳐鱼的翅膀就会上下扇动。
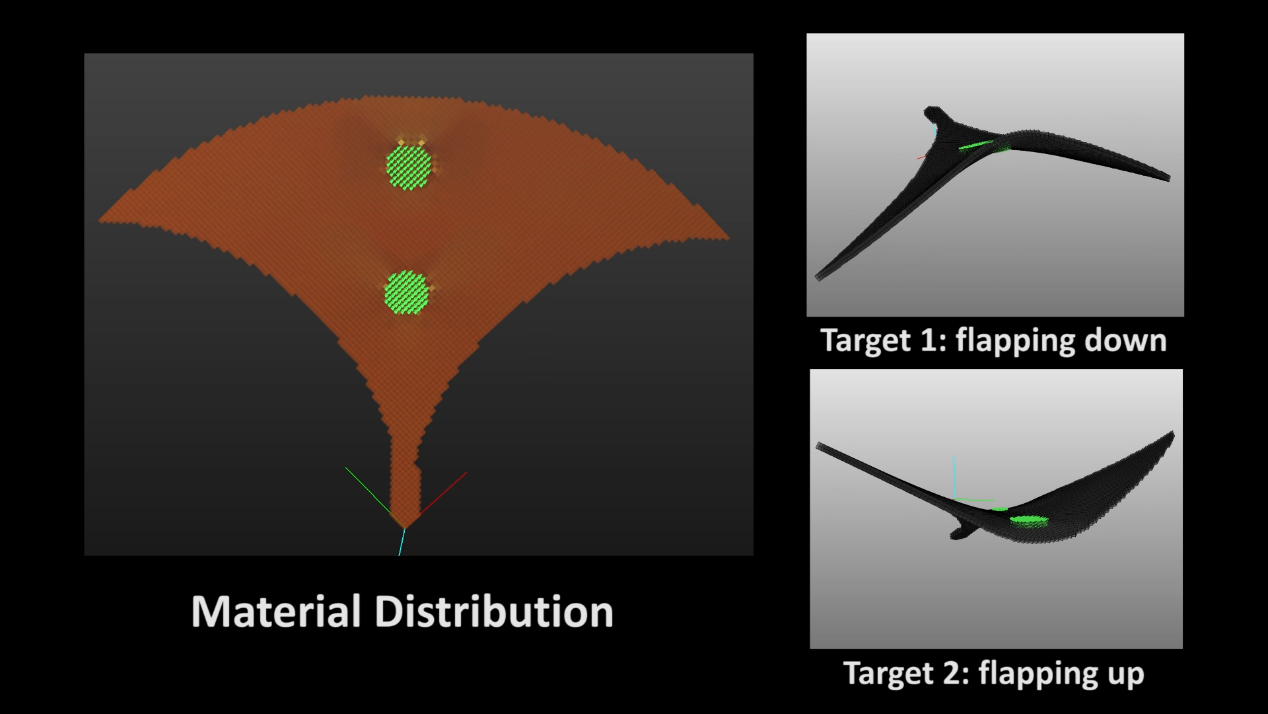
图4 柔性材料制作的“鳐鱼”