





供稿人:白路歌、王玲 供稿单位:西安交通大学精密微纳制造技术全国重点实验室 发布日期:2025-11-28
软体机器人具有灵活性、适应性和生物相容性,在仿生学、医疗保健和机器人学领域有着巨大的应用潜力。传统软体机器人难以模仿生物器官的复杂薄壁结构(如肠道、心脏)及其动态行为,同时软体机器人的现有增材制造方法(如DIW、DLP)在薄壁结构制造中存在易变形、低效率等问题。为了解决这个问题,来自哈尔滨工业大学的谢晖团队提出了一种均匀磁场辅助立体光刻(UMA-SL)方法,可以打印具有曲面中空结构和可编程各向异性磁化性能的3D薄壁软体机器人。
首先,研究人员开发了含NdFeB颗粒的光固化树脂作为打印墨水,通过添加气相二氧化硅提高了墨水分散稳定性,通过优化墨水的固化参数平衡了材料的机械性能与磁化密度;采用Halbach阵列+电磁螺线管组合,制造了高强度(80mT)、高均匀性(强度误差小于5%,方向误差小于1.5°)的3D可调磁场装置(图1)。进一步地,研究通过结合此3D可调磁场装置和DLP光固化技术实现了磁性图案的实时编程,能够制造具有不同磁取向的3D结构。此外,研究通过有限元模拟优化了结构中的支撑位置(避开应变集中点)和尺寸,解决了薄壁结构(壁厚200μm)的打印变形问题,实现了空心比0.92的薄壁结构的制造。
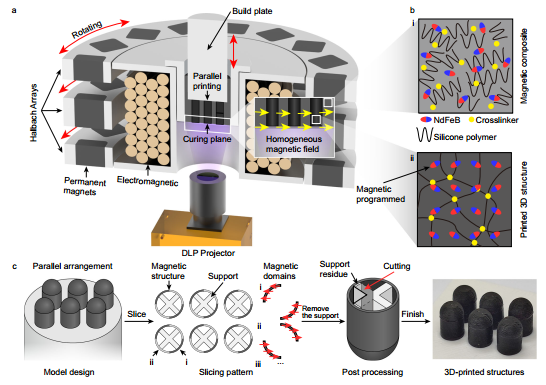
图1 可编程三维均匀磁场辅助光固化打印方法
为了验证制造得到的薄壁软体机器人的功能,研究人员制造了一些仿生医疗机器人,包括人工心脏瓣膜、肠道模拟器等。研究根据人体心室的结构和功能特点,设计了一种磁性三维泵送结构,通过交变磁场的作用成功地模仿了生物脉动流机制;设计并制作了一种模拟肠道蠕动流体输送的磁性三维挤压结构,随着驱动磁场的控制,磁性管道形成蠕动波,将流体推进到近端,直到挤出,成功模拟了模仿肠道的蠕动排便功能;研制了能够模仿生物吸排行为的软胶囊机器人,通过磁控变形实现了液体载运-靶向释放功能,可以进行精确的药物输送和样品收集。

图2 (A)仿人体肠道的磁性三维挤压结构;(B)仿生磁性三维泵送结构;(C)具有仿生吸入-排出行为的磁性软胶囊机器人
综上所述,该技术成功实现了具有中空结构、曲面和可编程各向异性磁化的3D薄壁软机器的高质量打印制造,提升了设计自由度和制造精度和制造效率,突破了薄壁磁性软机器制造的关键瓶颈,能够模拟循环流体推进、单向流体输送、蠕动变形、主动靶向货物输送和递送以及液体活组织检查收集,为仿生医疗机器人和微创诊疗工具的开发提供了新方法,具有重要生物医学应用前景。