





供稿人:雷沁霖、高琳 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2024-07-20
随着3D打印技术的飞速发展,软体机器人的设计和制造领域正在经历前所未有的革新。软体机器人以其独特的柔韧性、适应性和与生俱来的安全特性,正逐步渗透到医疗、探索、制造及人机交互等众多应用领域。然而,实现软体机器人的高效驱动和精确控制一直是一个挑战,特别是对于介电弹性体换能器(DET)这类至关重要的驱动组件。近期,一项由Danner等人主导的研究在《先进功能材料》杂志上发表,介绍了一种基于多材料3D打印技术,使用专为高介电常数设计的硅氧烷墨水制造DET的新方法,为软体机器人的设计与制造带来了突破性的进展。
软体机器人技术的核心在于开发能够模拟生物体柔软度和适应性的材料与驱动机制。介电弹性体(DE)作为软体机器人领域的一类重要材料,其原理是通过外加电场诱导材料形变来实现驱动,但传统DET材料的高粘度和低屈服应力给3D打印带来了挑战。尽管已有针对直接墨水书写(DIW)优化的DET油墨,但这些油墨往往导致弹性体硬度增加和机械损失增大,影响了DET驱动器的性能。因此,寻找既能满足打印要求又能保持良好电驱动性能的材料配方成为迫切需求。
为了解决这一问题,来自瑞士联邦材料科学与技术实验室(Empa)的Danner等研究人员借鉴了毛细管悬浮液的概念,设计了一种全新的DIW DET油墨。该油墨由两种不相溶的硅氧烷液体和填料混合而成,形成了一个独特的毛细管悬浮液体系。这种体系使得油墨的流变学性质(即流动和变形特性)能够独立于弹性体的机电性能进行调节,从而打破了加工性能与最终应用性能之间的相互制约关系。通过精确控制填料和次要液体的含量,研究团队能够优化打印过程的可加工性,同时保持或增强弹性体的性能。
研究中特别指出,将极性硅氧烷作为次要液体融入墨水中,所得到的打印弹性体的介电常数较之商用聚二甲基硅氧烷提高了四倍之多。这意味着,使用这种新型墨水打印出的器件能在较低电压下实现有效驱动,大大降低了驱动所需能耗,同时拓宽了软体机器人的应用范围。通过多层次的DET设备打印与表征,证实了这种不相溶的毛细管悬浮液不仅改善了油墨的可加工性,还显著增强了弹性体的性能。
该研究的另一亮点是成功展示了多材料3D打印技术在制造分层DET器件上的应用。这一技术的实现,为软体机器人的复杂结构设计与功能集成开辟了新天地。通过精确控制不同材料墨水的沉积,研究人员能够在一个单一的软体机器人组件中整合多种功能,如驱动、传感乃至能量存储,进一步提升了软体机器人的智能化和多功能性。
为了确保新材料的性能和可靠性,研究团队采用了多项先进的表征技术。例如,使用热重分析(TGA)测量材料的热稳定性,以及扫描电子显微镜(SEM)观察打印结构的微观形态。这些表征结果不仅验证了新墨水的化学稳定性和物理结构完整性,也为后续的性能优化提供了基础数据。
Danner及其同事开发的基于毛细管悬浮液的高介电常数硅氧烷墨水,不仅克服了3D打印软体机器人驱动组件的加工难题,还显著提高了器件的性能,使软体机器人能够以更低的操作电压实现高效驱动。这项技术的出现,预示着软体机器人领域将能够充分利用DET的全部潜力,为未来的软体机器人设计提供无限可能。未来的研究方向可能包括进一步优化墨水配方、探索更多种类的极性硅氧烷以及开发更高效的多材料打印策略,以推动软体机器人技术向更加智能、高效和实用的方向发展。
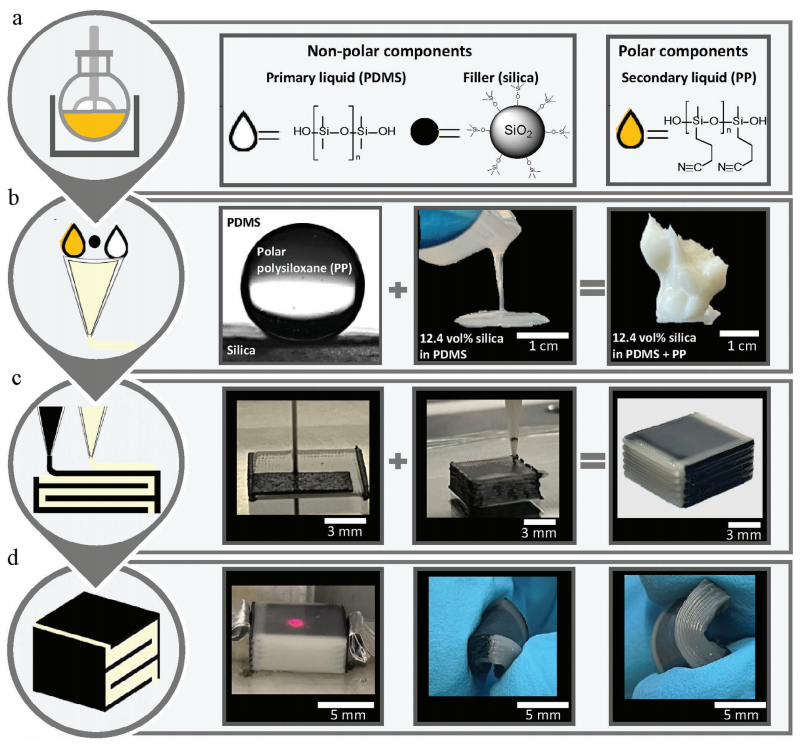
图1从合成到3D打印叠层介电弹性体致动器的过程