





供稿人:陈文瑜、高琳 供稿单位:西安交通大学精密微纳制造技术全国重点实验室 发布日期:2024-07-01
近年来,通过将机械部件与生物材料结合制造而成的生物混合机器人成为了先进机器人研究的一大热门方向。这类机器人将骨骼肌构建在柔性基底上,由肌肉组织提供动力,从而实现机器人运动。然而,传统的生物混合机器人尽管可以进行直线运动或大角度转向,却很难进行精细的转向运动。
为解决这一问题,东京大学的研究团队开发了一种仿人类双足运动的生物混合双足机器人。该机器人由漂浮体、柔性基板、腿和骨骼肌组织构成,其中,机器人的腿部采用喷墨3D打印技术制造,以实现其复杂的结构,使之具有一定柔性以支持机器人的运动。
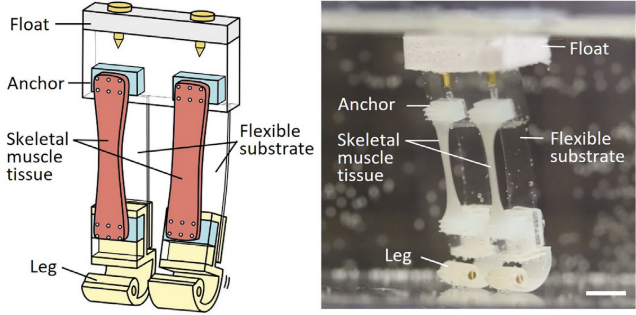
图1 由骨骼肌驱动的双足机器人
机器人的运动可以分为三个阶段:提升、悬挂和着陆。在第一阶段,骨骼肌组织的收缩导致腿部抬升距离持续增加。在第二阶段,由于柔性基板和骨骼肌组织的弹性,悬空的腿会产生一定的振荡,当悬空腿的前进距离达到最大时,释放肌肉的收缩力。第三阶段中,悬空腿由于重力落地,机器人完成向前运动。运动过程中,通过一条腿的重量固定与底面的接触点以提供物理旋转中心,从而实现旋转运动。这种运动方式由于机器人在其运动轴上的距离更短,因此能实现更精确、自由的运动。
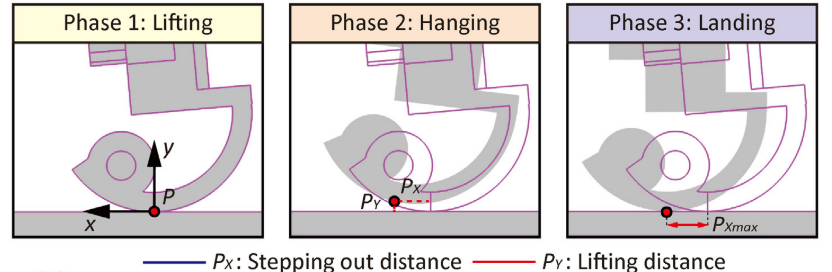
图2 机器人运动的三个阶段
这项研究的结果为培养的骨骼肌组织驱动的软机器人的发展提供宝贵的见解。此外,这项研究的概念有助于弹性外骨骼的研究,并可以作为动态运动模型用于药物疗效研究和病理生理分析。