





供稿人:王蕾蕾、李涤尘 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2024-06-07
机械超材料是具有人工结构的工程材料,它们可以表现出不寻常的物理性质,包括负泊松比、压缩作用下扭转、负刚度和负热膨胀系数等,广泛应用在结构变形、能量吸收、减轻冲击和影响等中。但是对于人造材料来说,所需的特性往往会发生冲突,例如,工程材料通常通过牺牲弹性来实现高能量耗散,或者通过失去各向同性来实现所需的膨胀性,这限制了它们的性能和应用。为了解决这些冲突,东北大学Yaning Li等提出并表征了一个新的 3D 平铺辅助超材料系列,包括各向同性设计、各向异性设计和旋转对称设计;并探索了两种连接类型的设计:带弹簧的组装设计和带双环连接的免组装设计;最后采用综合实验和数值分析方法,系统地量化了新设计的独特力学性能。
首先进行三维平铺辅助超材料的设计。以八面体和立方八面体镶嵌作为示例来演示设计过程。如图 1a 所示,镶嵌中的每个立方八面体有8个三角形面和6个正方形面。立方八面体的每个三角形面都紧挨着相邻八面体的三角形面之一,立方八面体的每个正方形面都紧挨着相邻立方八面体的一个正方形面,周期性3D平铺超材料的晶胞(RVE)由一个中心键控八面体和八个角片组成,每个角片是具有通道结构的立方八面体的八分之一。通过分析发现关键设计因素包括键通道方向和位置、键通道连接类型以及键对和通道对之间接触面的摩擦特性,如图 1b所示,通过改变键道方向,可以调整机械各向异性,通过引入偏移δ,可以实现耦合的辅助性和扭曲行为。此外,在本研究中还探索了两种不同类型的连接架构的设计:一种是带弹簧的组装样品,另一种是带双环的无组装样品,前者需要手工组装,后者可以通过多材料3D打印直接打印,如图 1c 所示。另外由于键队和通道的接触面之间的摩擦,这些设计有望在循环载荷下实现机械滞后,如图1d所示。
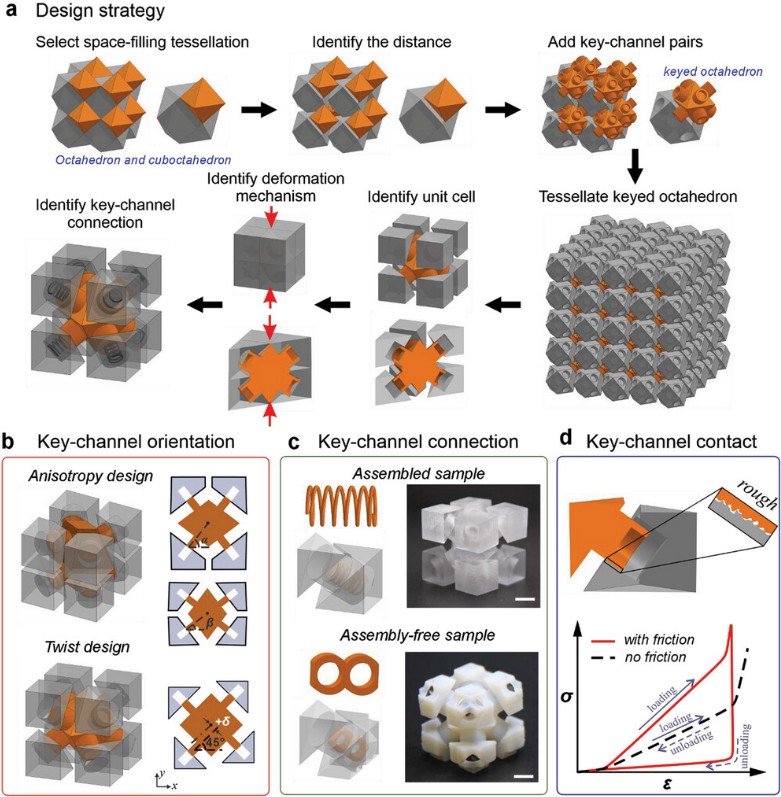
图1 构建 3D 平铺辅助机械超材料的设计策略和工艺。a)设计过程;b)通过改变键通道方向和位置来调整各向异性和扭曲;c)两种连接类型的设计;d)循环载荷下的摩擦引起的机械滞后
其次探索结构的变形机理及辅助性以及弹性和滞后性。对于变形机理及辅助性来说,首先从探索带弹簧的组装试样的各向同性设计开始,如图2a所示,在RVE中,键簧通道在 x-y、y-z 和 x-z 平面的所有视图中沿水平方向45°移动可完成各向同性设计;其次组装设计的RVE包括三部分,如图2b所示,第一部分是刚性中心八面体(橙色),通过 3D 打印机使用聚甲基丙烯酸甲酯材料制造,第二部分包括八个带有圆柱形雕刻帽的刚性角件(灰色),第三部分包括八个金属弹簧,对于免组装设计的RVE来说,如图2c所示,试样可通过同一台具有多材料打印的 3D 打印机制造,并使用聚甲基丙烯酸甲酯材料作为刚性部件,橡胶材料作为软双环;然后两个试样在带有 500 N 称重传感器的试验机上进行单轴压缩,如图2d和2f可以看出,两个试样的实验和数值分析结果的有效工程应力-应变曲线和有效泊松比曲线都非常吻合,同时变形分为三个阶段,对于组装试样来说,在第Ⅱ阶段显示出较大的辅助性,主要是因为弹簧的变形受到刚性构件键道的运动学约束,键与键道之间存在相对滑动。另外通过循环单轴压缩实验研究了结构的弹性和滞后性,结果发现,在每个加载循环之后,变形不仅可以完全恢复到其原始构型,而且在第Ⅱ阶段具有非常高的滞后性,这表明结构具有高弹性和高能量耗散能力。
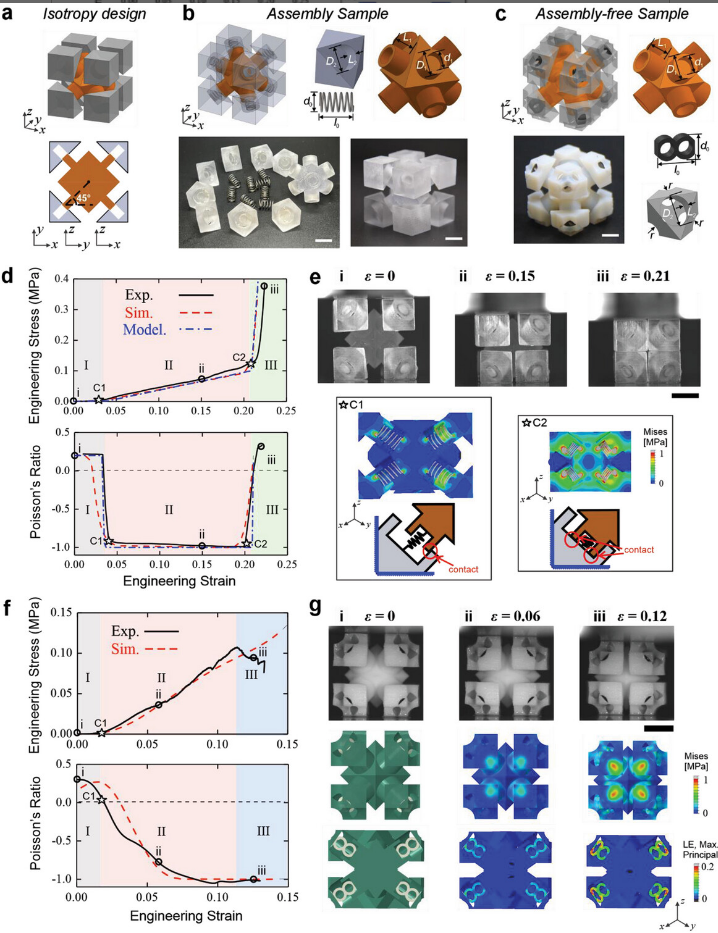
图2 结构的变形机理及辅助性研究. a)周期性三维各向同性设计和具有 BCC 对称性的 RVE;b)带弹簧的组装设计的几何形状和试样;c)免组装设计的几何形状和试样。d、f)实验和数值分析的工程应力-应变曲线以及有效泊松比与工程应变的曲线;e、g)在单轴压缩实验中试样在不同工程应变下的实验快照,以及具有变形构型的试样的有限元冯-米塞斯应力等值
然后探索结构的可调各向异性、耦合扭曲和辅助性。对于可调各向异性来说,以组装设计为例,基于各向同性设计,通过分别改变x-y平面和x-z平面上键通道的两个投影角度,可以创建具有调谐机械各向异性的设计,如图3a所示。对于各向异性设计,锁定行为的临界摩擦系数在 x、y 和 z 方向上变化,各向异性设计的有效模量和有效泊松比也可以通过解析推导,可以发现,通过在0°到90°之间改变投影角度,有效模量和有效泊松比可以在三个方向上调谐几个数量级。对于耦合扭曲和辅助性来说,以组装设计为例,通过引入偏移δ(定义为关键通道轴与x-y平面中中心键中线之间的距离),生成了围绕z轴旋转对称的新设计,如图3b所示。为了通过实验表征这种耦合扭曲和收缩的独特行为,设计并制造了特殊的夹具,以确保正确的边界约束,如图3c所示。此外,结构在0、0.04、0.08和0.12的总压缩应变下的实验和模拟的快照如图3d所示,可以发现结构在单轴压缩下表现出耦合扭曲和收缩,这在现有的机械超材料中很少见。
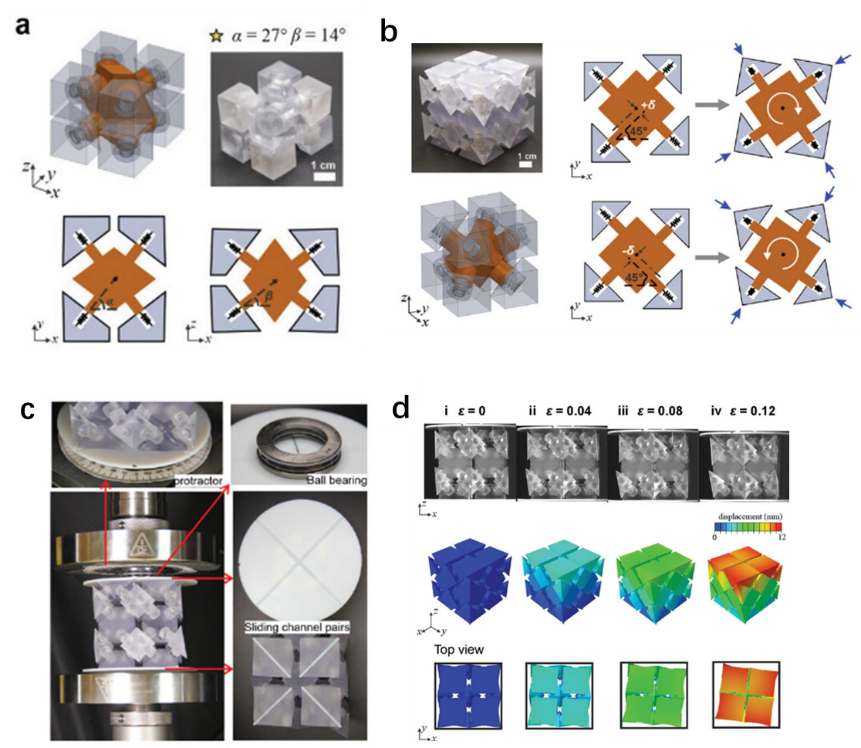
图3 结构可调各向异性和同时扭曲和辅助性研究. a) 结构各向异性设计; b) 设计策略、偏移δ和扭矩的试样和原理图; c) 测量扭曲和收缩的实验装置; d) 分别在0、0.04、0.08 和 0.12 总压缩应变下的实验和 FE 模拟的快照
通过本次研究可以发现,通过具有啮合键—通道对的3D空间填充瓦片来创建新型机械超材料的策略,可以表现出高回弹性,同时在大压缩应变下协同实现大机械滞后。特别是,这种超材料表现出理想的各向同性,同时接近各向同性泊松比的理论极限1,这在现有的三维机械超材料中很少见。此外,新型超材料在机械性能和行为方面具有广泛的可调性,包括在正常压缩下不寻常的耦合辅助性和扭曲行为。这种新型机械超材料可在致动器和阻尼器、软机器人、生物医学材料和耗能工程材料/系统中具有广泛的应用。