





供稿人:李红艳、连芩 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2023-11-09
皮肤为我们的身体提供了一层保护层,它也能够实现详细的感官反馈和与周围环境的柔和互动。在未来的机器人与医疗设备中,同时模仿天然皮肤的感官反馈和机械特性的人造皮肤具有很大前景。
美国斯坦福大学鲍哲南团队提出了一种低电压驱动、可监测压力与温度、并且能输出序列脉冲信号的可拉伸柔性电子皮肤系统(图1A)。该电子皮肤系统没有任何刚性电子元件,可以模拟生物皮肤的感官反馈功能,包括多模态接收、神经样脉冲序列信号调理和闭环致动。
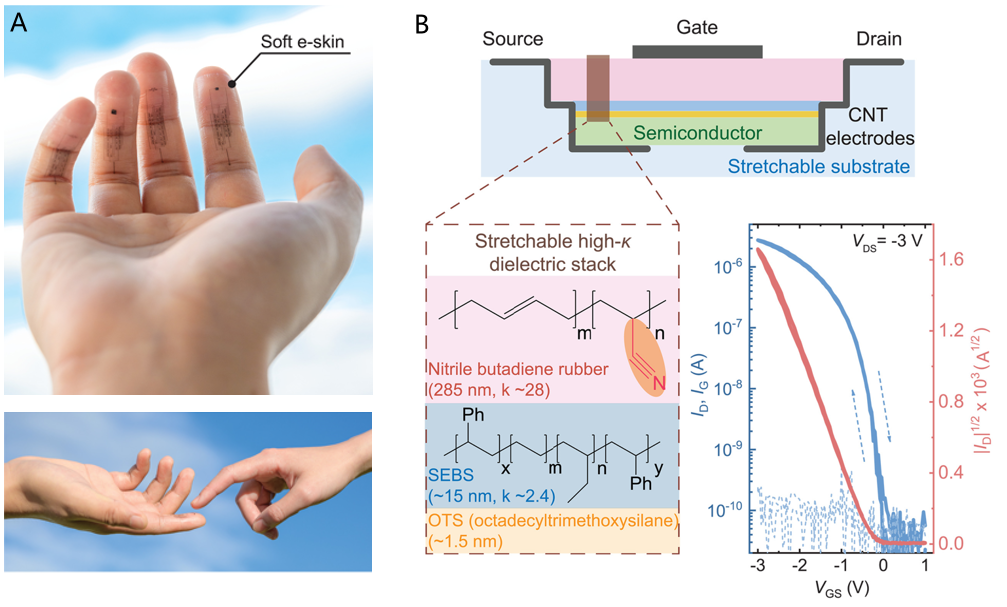
图1 柔性电子皮肤系统(A)及其内部三层电介质示意图(B)
电子元件通常由刚性半导体制成,并且它们只能在高电压下工作,这对于可穿戴设备来说在便捷性和安全性上存在很大的不足。理想的柔性电子皮肤当中的电子元器件需要有较低的工作电压,并且构建有复杂的信号调理电路。现有的柔性电子设备仍然需要高工作电压(30至100 V),这会产生安全和功耗问题。降低驱动电压需要增加栅极电容,这需要具有高介电常数的薄介电层。作为介电弹性体的丁腈橡胶中的丁腈基团极化使其有较高的介电常数,但其磁滞大、迁移率低,对实现低驱动电压和高载流子迁移率形成了挑战。
鲍哲南团队开发了一种三层电介质(图1B),通过超薄的非极性聚(苯乙烯-乙烯-丁烯-苯乙烯)(SEBS)弹性体涂层钝化高介电常数丁腈橡胶,然后进行疏水性十八烷基三甲氧基硅烷(OTS)分子修饰,从而获得了较为理想的材料性能。相比于普通单层结构,载流子迁移率提高了约50倍。基于该材料的良好的耐溶剂性和图案化性,又构建了可拉伸有机晶体管阵列,并进一步集成制造了用于直接皮肤操作的低压功能电路。这种全柔性的集成化电子皮肤系统,具有仿生感官反馈的功能和低驱动电压、高电路复杂性的特点,有助于皮肤义体、人机交互和神经机器人技术的未来发展。