





供稿人:陈文瑜、高琳 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2023-09-19
类生命仿生软体机器人具有自主供能、高能量转化率、自我修复等优秀特性,是一个有广阔应用前景的研究课题。将柔性电子器件集与类生命仿生机器人结合,形成生物混合软体机器人,可以结合传统机器人与类生命机器人的优势。然而,现有的生物混合软体机器人主要分为电极驱动和光驱动,需要使有线电极/光源跟随机器人以实现控制功能,导线的存在大大限制了生物混合机器人的应用。
为解决这一问题,哈佛大学医学院的研究团队开发了一种无线供能的生物混合软体机器人。该团队在柔性的无线供能与控制电路上,通过3D打印的方式构建多层可折叠的、生物相容的支架,再将心肌细胞接种到支架上。电路通过无线线圈接收电能,传输到刺激电路上,实现对心肌细胞的刺激。由于无线电路被集成到生物混合机器人上, 因此机器人的水下运动能力不会受导线的约束。
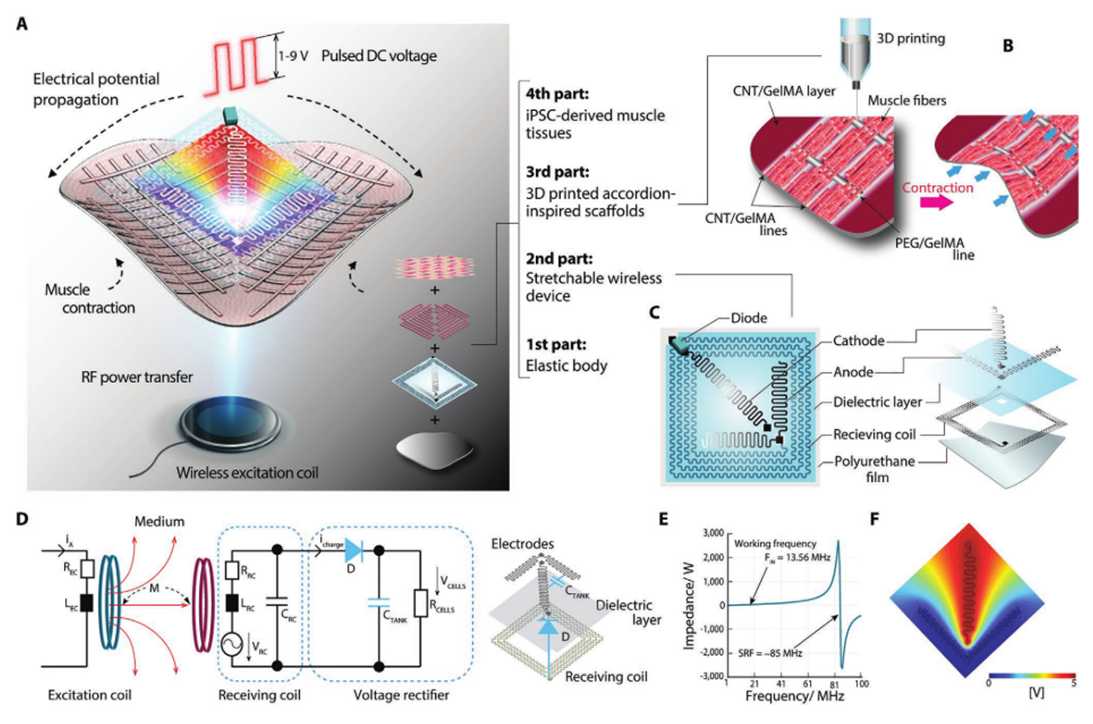
图1 无线功能的生物混合软体机器人概念与系统设计
实验表明,通过调整无线驱动频率,边长为2厘米的生物混合机器人能够以约580微米每秒的速度进行运动。同时,该驱动电路具有良好的生物相容性,未发现明显的生物毒性。总之,该创新设计方法为无约束的生物混合软体机器人设计提供了参考,为基于集成电路的交互式传感、靶向操作等功能的实现提供了可能,在生物医学等领域具有重要的应用价值。
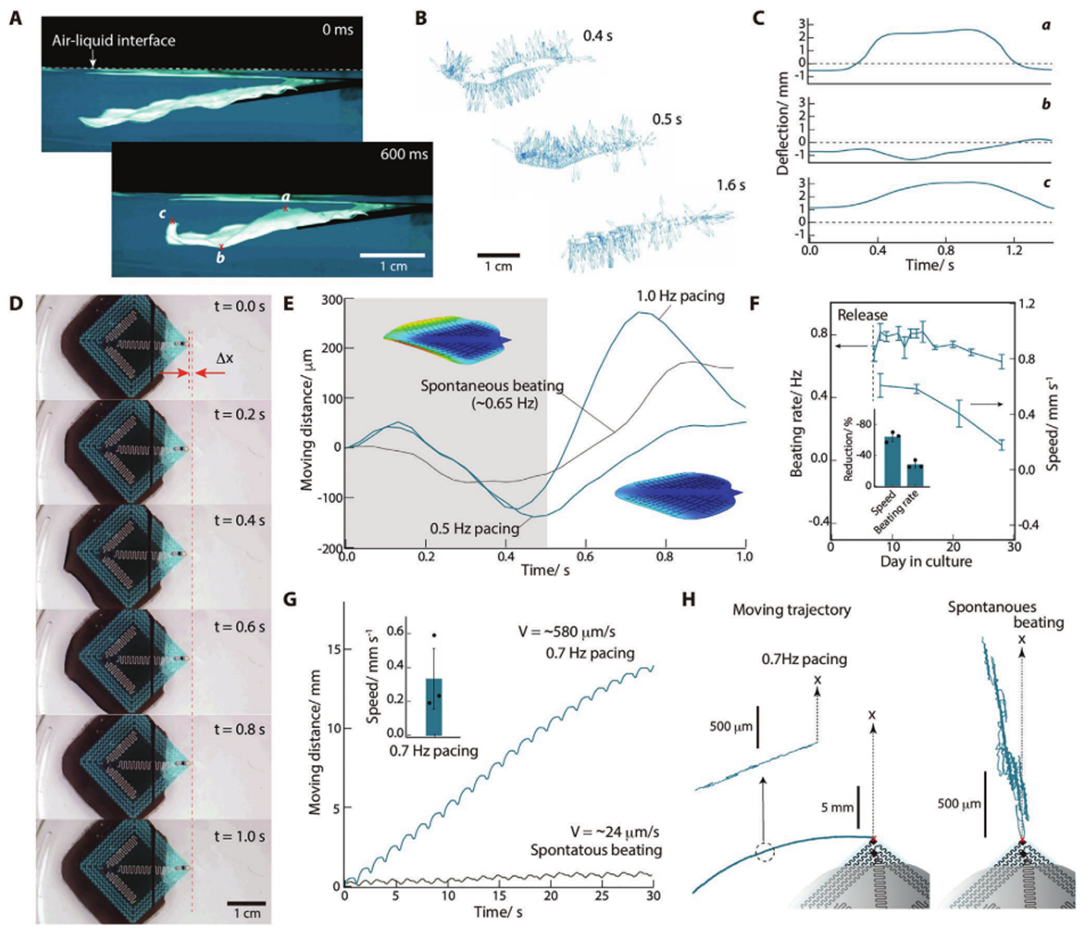
图2 生物混合软体机器人的驱动情况