





供稿人:齐晨云 连芩 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2022-12-23
植物的感性运动是植物体受到不定向的外界刺激而引起的局部运动,无需消耗额外代谢能量,这是由于各个运动的植物结构在其单个细胞和组织中经常表现出吸湿性行为,它们可以从环境中吸收和解吸水分子,使细胞在垂直于纤维素的方向上发生变形,造成各向异性的膨胀或收缩。当以双层的形式排列时,植物器官结构的单个细胞之间的差异性膨胀会导致整体形状的变化。植物的被动适应性在生物仿生特别是矫形器等可穿戴辅助技术中有着巨大的前景。
薯蓣通过其茎部螺旋线的拉伸,随着其托叶的扩张,对宿主植物表现出一种挤压力,避免了因重力作用而在宿主植物上滑动,这种挤压行为是平滑、连续的,而不是离散的,这就为适应性可穿戴设备的设计提供了一个很好的思路。受此启发,Tiffany Cheng[1]等提出了一种用于4D打印材料系统的材料编程方法,并用熔融纤维制造(FFF)打印机使用木材填充的长丝对整体材料系统进行4D打印,在手腕前臂夹板(一种常见的矫正装置)上实现了自紧功能(图1)。
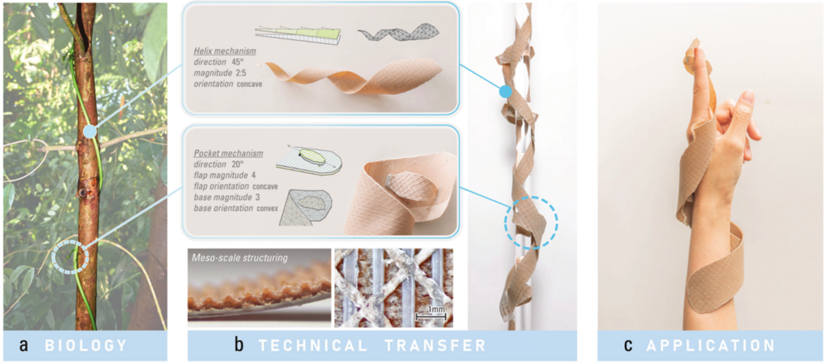
图1:仿生过程,从生物模型到可穿戴设备。
茎部产生挤压力的过程通常可分为两个阶段:1)围绕支撑物的螺旋、松散缠绕;2) 离散的侧向结构(分布在螺旋内表面上的托叶)的延迟膨胀向支撑物施加压力——因此向外推动螺旋,从而张紧系统,其过程如图2所示。
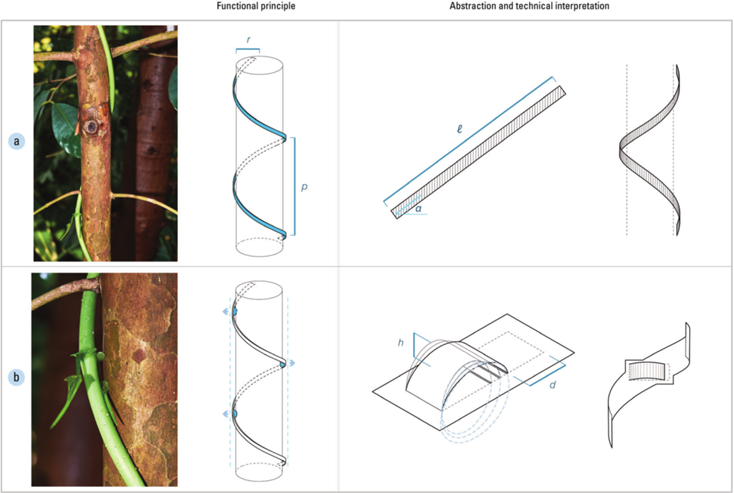
图2. 以茎为启发的a)缠绕过程b)侧向结构膨胀施压及张紧过程。
自成形材料系统可以看作简单子机构的集合,这些形状改变的基本单位叫做运动机构,单个运动机构由至少两种不同的材料组成: 响应的刺激致动材料和保持相对稳定的限制材料(与前者相比)。在响应刺激时,两种材料产生不同的体积变化,通过弯曲产生空间转换。通过设计运动机构中致动材料不同条带的长度,可实现扭转的不同角度和量。对此,作者提出了一种模拟托叶的袖珍机构(图3),该机构由五个部分组成,使用木材-聚合物复合材料(WPC)和丙烯腈-丁二烯-苯乙烯(ABS)长丝的组合,由于吸湿性,WPC在干燥或低相对湿度条件下释放水分,在潮湿或高相对湿度条件下获得水分,通过4D打印成形使每一个部分都单独变形以形成空隙实现张紧。
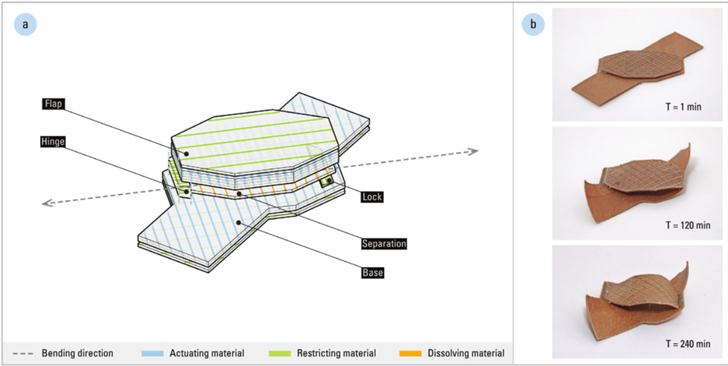
图3.袖珍机构的组成和张紧。
作者使用两个具有镜像手性的双螺旋测试了系统在光滑支撑上稳定自身的能力。其中包含袖珍机构的系统能够适应并抓住直径范围从15到30 mm的支架。相比之下,仅由螺旋(没有任何袖珍机构)组成的相同系统仅能够在30 mm直径的支撑物上稳定自身。作者将这一生物启发的运动机制应用到具有自适应收紧的4D打印矫正夹板的原型中(图1c),在长期使用过程中,用于固定的自成形装置可以被编程为随着时间的推移慢慢收紧自身(消除了由于肌肉萎缩而频繁移除和重新使用石膏的需要)。
通过仿生设计和材料的组合,4D打印夹板结构可以进行修改,以拥有比植物模型中出现的更多令人满意的功能(如具有多种定制属性的袖珍机构),最终增加生物启发的自适应可穿戴设备的实用性。