





供稿人:贺佩、贺健康 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2022-11-15
在过去的十年中,软体机器人在传统刚性机器人无法适应的领域确立了自己的独特地位。软体机器人依赖于流体驱动(例如,液压和/或气动)的柔性材料,促进了其在人机交互的安全性、较低的成本和操纵复杂和/或微妙物体的几何适应性。然而,目前软体机器人应用的一个关键障碍在于,增加独立操作的软体执行器(或自由度)的数量通常需要相等或更多的不同控制输入。为了减少或消除对这种外部控制方案的需求,美国马里兰大学机械工程系的研究人员提出了一种新颖的策略,即通过多材料3D打印,在一次打印中实现具有集成流控电路的软体机器人(图1)。
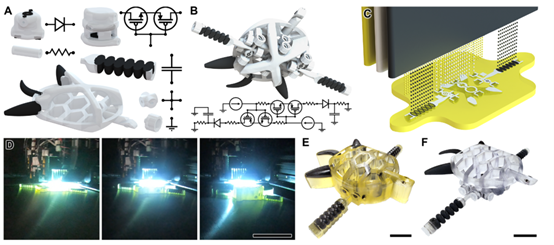
图 1 集成流体电路的软体机器人系统的一体化设计和增材制造策略
研究者设计了气压驱动的软体机器龟,其工作原理是基于单个振荡栅压(PG)输入的应用,而源压(PS)输入被设置为一个恒定的量级。当振荡的栅压(PG)输入达到最小值时,源压(PS)输入主要诱导流体流向流控晶体管的排气口,而不是流向在尖端流体密封的软执行器(图2A)。当振荡的栅压(PG)输入增加到能够专门激活具有最大流体特性的流控晶体管时,通往元件排气口的路径被阻塞,导致一部分源压(PS)诱导的流转而转向相应的软执行器(图2B)。所产生的与流体晶体管相关的软致动器的膨胀被设计成使脚蹼沿向下向后的轨迹移动(图2B)。随着栅压(PG)量级的持续增加,流控晶体管都被激活,导致两组相应的软执行器的膨胀结合在一起,为鳍状肢诱导一个更大的向后轨迹(图2C)。当振荡的栅压(PG)输入接近其最大峰值时,最后的射流晶体管激活,导致所有的流动转向三组连接的软执行器,这是为了使鳍状肢向一个向上向后的轨迹移动(图2D)。之后,这个循环相对于振荡的栅压(PG)输入周期性重复(图2,A到D)。
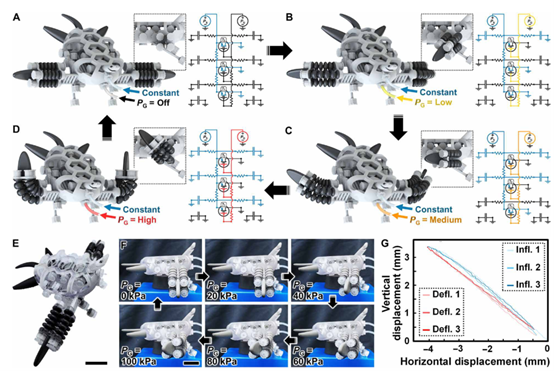
图 2 基于正弦输入的软体机器龟的工作原理及实验结果。
在这项工作中,研究人员首次引入了使用完全集成流体电路的软体机器人的一体化增材制造的概念。为了支持控制软体机器人功能的底层流控电路的复杂性,提出了与3D打印策略兼容的基本的流控元件,包括流控二极管以及常闭和常开流控晶体管。过去,传统制造的流体操作器很难实现和/或定制流体特性。而本研究所报道的两组流体晶体管的一个特别重要的特性来自于一个介入活塞连接的源漏区和栅极区的横膈膜,流体相关的行为可以直接通过几何手段(即横膈膜直径之比)按需要调整。实验结果表明,无论是独立的还是集成为大型集成流控电路的一部分时,流控电路元件表现出的性能特征都与电子元件一致。虽然这项工作中的流控元件和流体电路是针对软体机器人设计的,但流体阀门和功能可以广泛应用于化学、生物和生物医学等重要领域。