





供稿人:孟子捷、贺健康 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2022-11-06
机器人技术有望支持医疗保健和康复服务,或增强虚拟现实交互。然而,现实中动态环境通常需要广泛的机器人控制算法、传感器和反馈回路,以实现与人的安全交互。由软材料制成的机器人通过其自适应的软结构缓解了这些挑战。然而,由于没有任何传感器反馈,软体机器人仍然依赖于操作员的观察和干预。快速发展的新技术也导致了科技废物数量的增加,由于软材料的寿命有限,或部署的机器人无法回收等问题,软体机器人需要提高其可持续性。
针对上述问题,约翰内斯开普勒大学林茨理工学院软材料实验室的研究人员提出了利用可降解材料、集成传感器网络的3D打印柔性致动器的设计和制造策略。使用熔融沉积成形打印了有弹性但完全可降解的生物凝胶,最小特征尺寸为0.6 mm,长径比超过3(高宽比)。打印的生物凝胶可拉伸超过500%的应变,并可重复使用。打印的柔性气动驱动致动器,能够实现全向运动,最大弯曲角度达74°。
复杂的传感器网络对于所有形式的运动都是必不可少的,研究人员进一步将基于可拉伸波导的光学传感器网络与软体机器人致动器结合起来(图1A)。这种组合使集成高精度的曲率、方向和力传感的致动器成为可能。研究人员展示了机器人的能力,通过使用其传感特征来检测和清除障碍,实现了搜索和清除程序(图1B)。与此同时,打印的生物凝胶可以轻松重复使用或处理,而无需考虑环境问题 (图1C)。
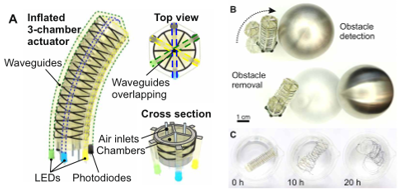
图 1可降解的3D打印的集成波导传感器的柔性致动器。(A)波导传感器集成在致动器上,并在顶部交叉,以感知弯曲状态和触摸输入。(B)三腔气动\纤维增强\集成光学传感器的柔性致动器,传感器检测致动器路径中的障碍物,并移除物体。(C)浸泡在水中时,明胶致动器和波导膨胀溶解,可以实现完全的生物降解。
研究者实现了一种搜索-清除程序,以消除驱动器附近的障碍(图2)。该程序从致动器尖端沿其中心环形运动。在此初始校准后,记录各自的强度变化,致动器搜索其附近的障碍。在循环搜索路径上,寻找与最初记录的强度值的偏差。通过这种方式,致动器感知其路径内障碍物的接触事件。一旦检测到,搜索程序停止,压力从所有腔室释放。最后,以最大的压力向检测到的障碍物方向驱动,随后将障碍物推开。
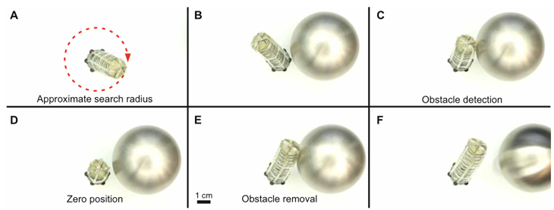
图 2 柔性致动器的自动搜索-清除程序。(A到C)致动器执行圆周运动,直到它检测到撞击障碍物时意外的强度下降。(D至F)检测后,从障碍物的起始位置开始,向障碍物方向施加最大压力,将障碍物清除。
尽管该致动器成功实施了搜索-清除任务,该器件依然有需要改进的地方。例如,在致动器体旁边的空间分辨率是有限的;当多个事件同时发生时,无法区分不同的输入信号;根据不同的区域,区分不同的刺激(如弯曲和触摸)仍是一个挑战。在未来,不同波长或光调制的分布式光纤网络可以帮助克服这些限制。机器学习算法将帮助解释多种信号,以更好地区分多种变形,从而增强该机器人设计的通用性。此外,增加该致动器复杂性还需要更先进的致动器形状和多材料的组合。到目前为止,粘度和冷却时间阻碍了悬垂特征或腔体的打印。与多材料打印相结合,开发合适的可生物降解支撑材料将解决这些问题。