





供稿人:严峻腾、连芩 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2022-10-18
组织工程在人工器官或组织生物的打印过程中取得了越来越多的成功。其中水凝胶类材料典型的加工制造是基于挤压的3D打印设备完成的。而在经典3D打印的材料挤压过程中,打印头仅沿笛卡尔坐标系的x、y轴进行线性运动,并在层过渡处进行z轴调整(x、y轴平行于铸造平台,z轴垂直于铸造平台)。因此,使用三轴打印机,物体通常是在平面层上打印的。
德国斯图加特大学机床与制造单元控制工程研究所的Frederik.Wulle教授团队,该团队开发了基于磁共振成像的明胶甲基丙烯酰水凝胶在非平面表面的多轴3D打印方法。相关成果发表在权威期刊《Additive Manufacturing》上
该团队基于目前水凝胶的3D打印仅限于三轴打印机,三轴打印机存在固有的缺点,如优化平面打印基材、表面质量有限、打印悬垂时需要支撑结构等的前提。开发了水凝胶的多轴3D打印。首先,对胫骨的MRI扫描数据进行处理,得到光滑的骨表面,然后将其送入曲面切片和路径规划算法,生成由曲面打印路径组成的非平面层,见图1。打印路径被新开发的打印头转化为基于甲基丙烯酰明胶的3D打印水凝胶,打印头安装在一个七轴运动学装置上,见图2,也允许打印后将打印的水凝胶油墨UV固化为固体水凝胶。最后比较了3D打印水凝胶与模压水凝胶的性能。结果表明,3D打印水凝胶的硬度较模压水凝胶低,在水中的溶胀平衡度较高。表明了多轴3D打印技术在水凝胶加工方面的优势,同时也提出了了三轴和多轴3D打印相关的交联化学和水凝胶油墨配方等开放性研究问题。
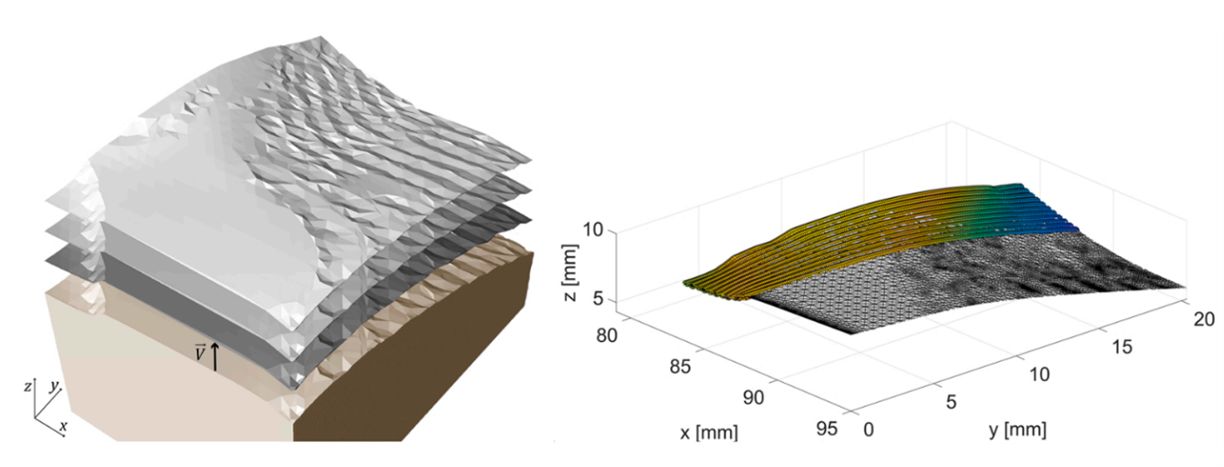
图1通过偏移切片生成层(左);在+x边的镶嵌表面和前11个在-x边在一个表面截面上生成路径(右)。
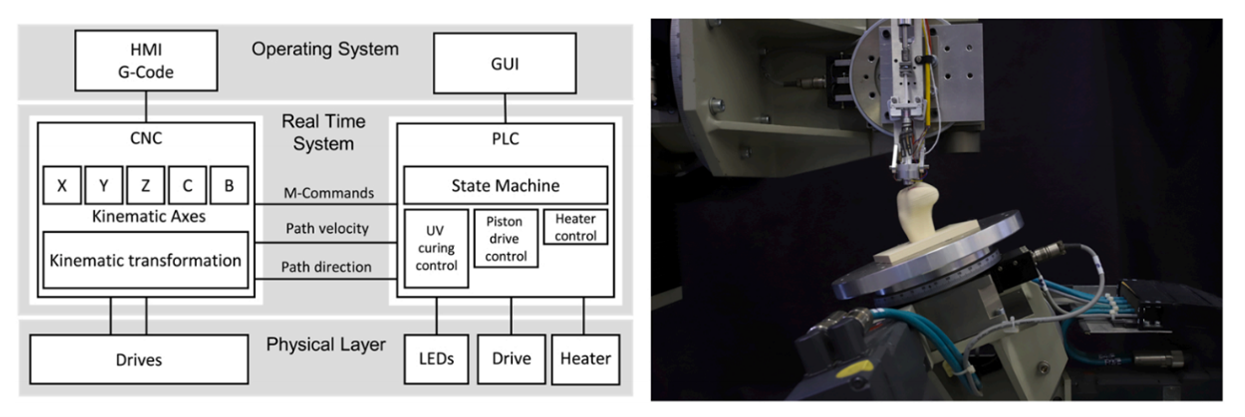
图2:数控印刷机的控制架构(左);七轴运动学上的主动过程(右)。