





供稿人:冯俊男 高琳 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2021-12-14
心肌组织和骨骼肌组织是类生命机器人中广泛使用的生命材料。其中骨骼肌组织收缩的可控性更高,因此可以实现更加精准的驱动,但是骨骼肌的弹性特性引起的缩减力(shrinking force)会导致组织长度不断减小,因此骨骼肌组织的寿命较短。本文使用3D打印制作了载有成肌细胞的水凝胶片,介绍了一种由一对拮抗的骨骼肌组织驱动的类生命机器人。该机器人可以实现大驱动力以完成拾取-放置的动作,同时相较于传统的骨骼肌驱动的机器人,其寿命更长,达到了一周。
该研究的重点在于拮抗骨骼肌组织的配置和制造方法。首先准备载有成肌细胞的水凝胶片,其制备过程如下:使用3D打印制作相应的树脂模具,向其中注入PDMS弹性体以制成PDMS印章,在PDMS印章和硅橡胶片中夹入成肌细胞和水凝胶溶液,经培养后释放PDMS印章,最终得到具有孔和条状结构的载有成肌细胞的水凝胶片。将数片水凝胶片通过孔堆叠并固定至机器人的骨骼(机器人骨骼主体部分通过3D打印制造),两组水凝胶片对称放置。通过培养,每一组水凝胶片上的条状结构会融合成一个结构,最终形成一对拮抗的骨骼肌组织。通过单独刺激两块骨骼肌的收缩和舒张,该机器人可以驱动其尾部的关节完成约90°的双向转动。通过形态和功能分析,本文证明了水凝胶片上的条状结构促进了单位横截面积上的收缩力(contractile force),同时也证明了一对拮抗骨骼肌的配置可以平衡每一块骨骼肌中的缩减力,进而维持了组织的长度和收缩力,因此获得了更久的寿命。本文的研究成果有助于突破传统类生命机器人在设计上的限制,文中提出的制备骨骼肌组织的方法使得可以通过操作水凝胶片在任意位置构建骨骼肌,以模仿生物体的结构,提高了使用骨骼肌组织驱动模仿多种类生物动作的潜能。
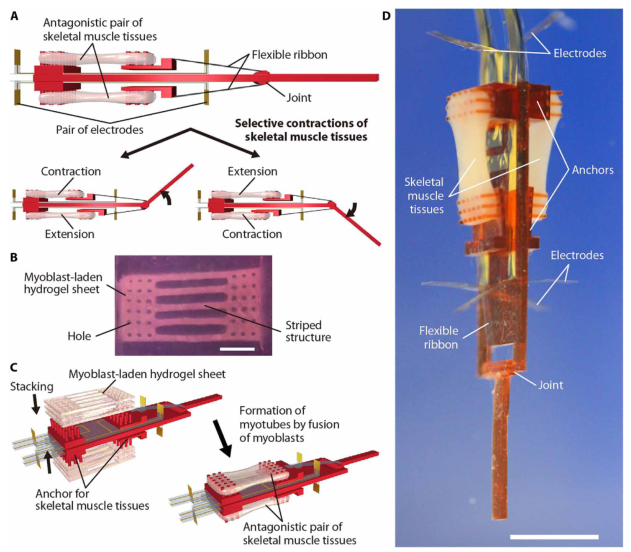
图1 一对拮抗骨骼肌组织驱动的类生命机器人的结构
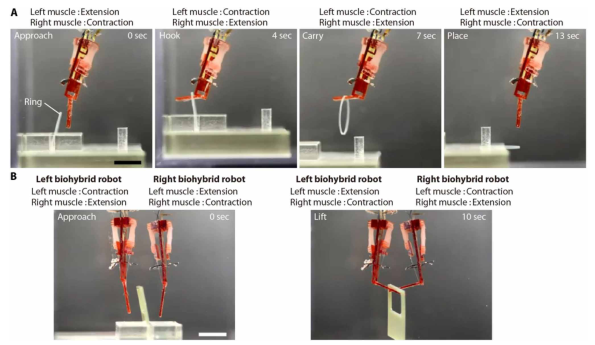
图2 该机器人执行的拾取-放置动作