





供稿人:梁拓,高琳 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2021-11-07
2021年6月,多伦多大学机械与工业工程系的研究团队在Science Robotics期刊上发表一篇研究生物混合机器人的文章。文章中提出了一种提出了一种改造秀丽隐杆线虫线虫的遗传和神经系统的方法,并创建了一个不受限制的、高度可控的活体软微型机器人(称为“RoboWorm”)。活的蠕虫通过光遗传学和生化方法进行改造,以关闭其神经元和肌肉系统之间的信号传输,同时其肌肉细胞仍保持光学兴奋。这种经过工程改造的 RoboWorm 展示了以光遗传学方法自动控制再现天然蠕虫运动行为的能力。此外,所提出的基于视觉的闭环控制方案使具有空间感的 RoboWorm 能够穿越障碍物以到达预定目的地。通过这项技术,研究者将瘫痪的蠕虫变成了一个活的、可控的、爬行方向和目的地可控的软体微型机器人。得益于其微米级的尺寸和柔软的身体,RoboWorm 最终可以发展成为微型活体动物代替者,以执行各种显微操作任务,例如移动微型物体、微环境导航和游泳。还可以制造一种蠕虫状的人造微型机器人,其身体具有类似肌肉的光驱动致动器,这可以实现线虫在不同图案的光刺激下不同爬行模式。
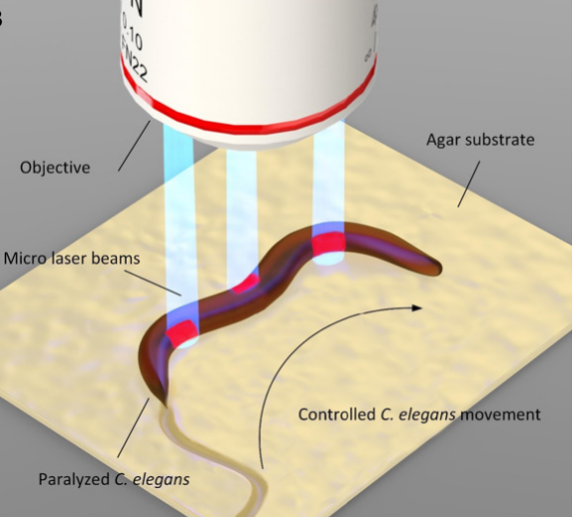
图1 激光束激发下蠕虫弯曲响应
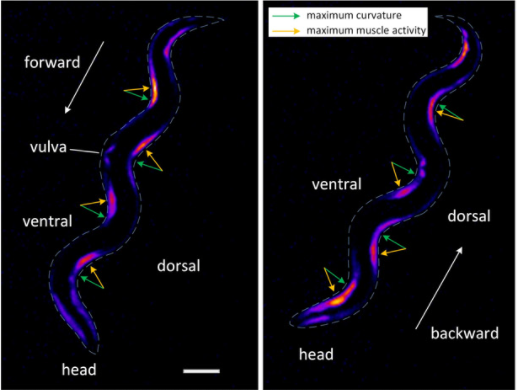
图2 蠕虫向前和向后爬行期间的相位差(强度越高表示肌肉活动越强)
从机器人的角度来看,生物和工程系统在完成常见的运动任务方面具有相似的功能,这导致将工程思维注入生物体的可能性。这种集成方法填补了生物感觉运动系统和工程运动控制之间的空白,并转化了活的线虫成微米大小的可控 RoboWorm。它提供了一种通过光遗传学肌肉激发直接从活的多细胞微生物开发生物混合机器人的实验方法。这项工作中报道的蛇形运动机制和时空光学驱动方法也可以很容易地应用于设计以光敏材料作为执行器的蠕虫状人工微型机器人。此外,除了在微型机器人方面的前景之外,该 RoboWorm 系统还可用作进一步研究蠕虫蛇形运动的生物物理学和神经基础的平台,从而可作为对秀丽隐杆线虫和其他线虫进行基础研究的有效工具。
除了在机器人技术方面的巨大潜力外,这项技术还可以实现对秀丽隐杆线虫和其他线虫物种的基础研究。例如,为了研究对感觉-运动整合至关重要的本体感受反馈,可以操纵蠕虫身体上的特定肌肉群以适应任何类型的自然姿势,并同时记录运动神经元和前运动中间神经元的钙动态。