





供稿人:马浩宇 李涤尘 供稿单位:西安交通大学机械制造系统工程国家重点实验室 发布日期:2021-03-27
大幅面增材制造是3D打印技术的自然延伸,以往增材制造受到3D打印机的腔室体积限制,无法成型较大尺寸的零件,而按比例扩大打印机尺寸既昂贵又耗时,且无法同时优化打印精度及打印效率,因此,采用具有一组多喷头的协同3D打印技术有很大的发展空间。
在多喷头协同打印领域,浙江大学沈洪垚团队已初步实现通用化较强、兼具打印精度及打印效率的协同3D打印技术。设计了多机器人协同打印系统,包括实验平台的搭建、整个系统的打印处理及机器人的放置位置研究;提出了一种基于效率最优化的区域分割算法,合理地分配了各喷头的打印区域,实现了打印效率均分;对于多喷头的打印顺序,合理分配了各喷头的打印任务,实现了无碰撞打印,成功避免了机器人间的相互干扰;进行了多机器人的3D打印实验验证,论证了此方案的高效率优势。
如图1所示,通过几何轮廓识别及分割,结合模拟退火算法,寻找最优分割点,实现了打印区域的最优分割,与之前研究提出的路径调度算法相比,基于模拟退火算法的分割算法更简单通用,在路径分割及调度过程中不涉及避免干扰的问题。
进一步将打印区域进一步划分为安全区及干涉区,并保证同一时间仅有一个机械手在干涉区内进行打印,如图2所示,为打印头的打印顺序规划,不断切换机械手在两类区域的打印,直到完成所有打印任务,成功消除了打印头碰撞的可能性,并充分利用了打印头的效率。
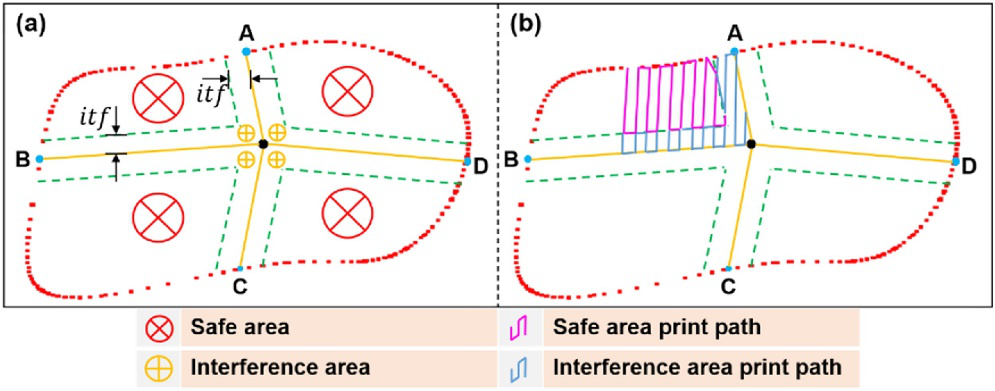
图1 打印区域两次划分
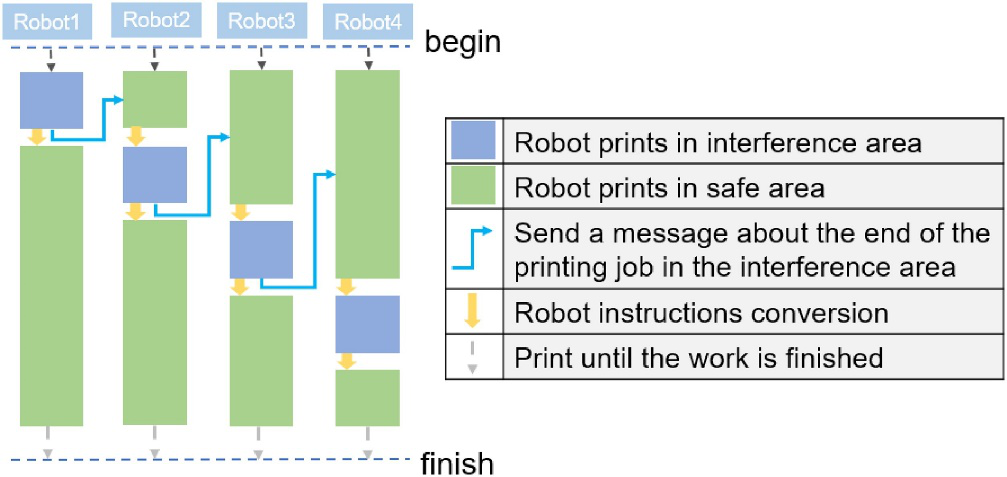
图2 打印顺序规划
针对以上算法进行了实验验证,通过比较协作打印和独立打印之间的打印时间差异,可以发现多机器人系统以几乎四倍的效率实现了相同的打印任务。结果表明,分配打印作业时,每个机器人的工作量几乎可以保持一致。主要影响因素是分割区域和分割线上辅助路径的偏差。