





供稿人:焦天、连芩 供稿单位:机械制造系统工程国家重点实验室 发布日期:2020-10-28
在人体器官上直接打印柔性传感器将有利于实时准确的监测患者的器官。在不断活动的器官上打印柔性传感器面临两个方面的困难:一是打印过程中必须实时监测器官的运动,同时快速的调整喷头位置和打印路径;另一方面,打印的生物材料要求有优异的生物相容性、拉伸性能、粘接能力和电学性能。
为了解决上述问题,美国明尼苏达大学Zhijie Zhu等人提出一种原位打印柔性传感器的方法。研究人员使用了两套摄像系统:一套摄像系统用于扫描猪肺的表面特征,规划打印路径,另一套立体摄像系统可以实时重建猪肺表面的时变三维几何形状,从而调整喷头位置和打印路径,整个调整过程只需要60毫秒。
打印所用的离子水凝胶主要由氯化锂(LiCl)、丙烯酰胺、聚丙烯酰胺、乙二醇和超纯水组成。该水凝胶表现出适合打印的流变特性,水凝胶层打印完成后与硅树脂环贴附在一起,通过镶嵌到硅树脂中的铜电极与外界相连。水凝胶层通过紫外光固化之后与猪肺紧密粘结。力学和电学测试显示打印的柔性传感器表现出与猪肺组织相似的拉伸性能,传感器的电阻与水凝胶层的形变呈线性相关。
随后课题组使用打印的传感器对猪肺的呼吸进行了监测,结果显示打印的传感器可以成功的获取猪肺呼吸产生的形变。这种自适应的3D打印方法可以增强机器人辅助医疗的能力,实现在人体表面和人体内部自动直接打印可穿戴电子和生物材料。
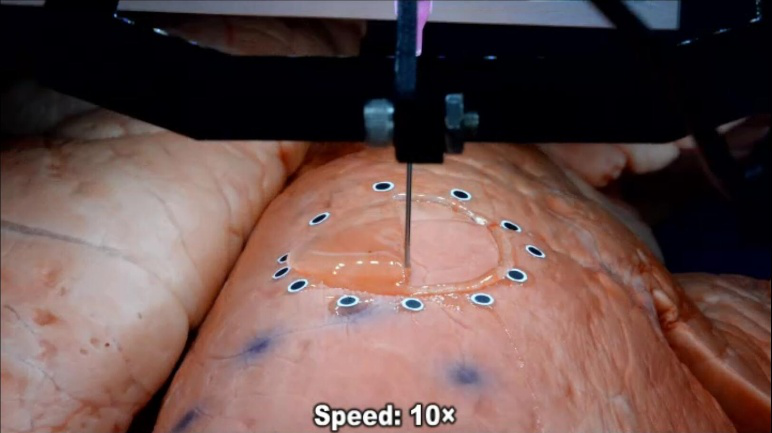
图1 在呼吸的猪肺表面打印柔性传感器
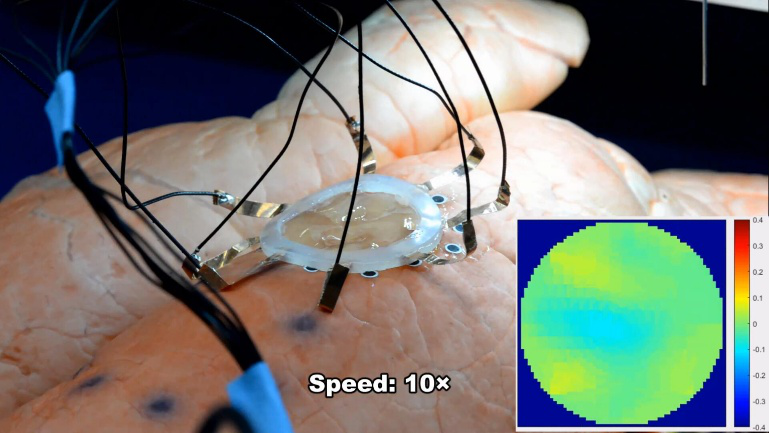
图2 打印的柔性传感器监测猪肺的呼吸