





供稿人:张道康、田小永 供稿单位:机械制造系统工程国家重点实验室 发布日期:2020-10-16
近日,一项3D打印欠驱动折纸结构机械手[1]是由西储大学、约翰霍普金斯大学以及德克萨斯州农工大学的研究者共同完成。他们称这种新型的欠驱动机械手为Twishter Hand(扭转之手),该机械手是由三个3D打印的手指组成的,手指机制的灵感来源于折纸扭转塔结构,该机械手仅通过单个伺服电机驱动,就可以同时控制三个手指的张开和闭合运动。为了保持折纸设计独特的结构可重构性,表面必须保持刚性,而折痕(发生弯曲的地方)必须具有柔韧性才能进行运动。可以选择使用柔性和刚性材料的3D打印被认为是制造这种复杂结构的唯一合适方法。

图1 欠驱动折纸机械手,手指张开(左)和闭合(右)
这种设计的机械手具有以下几个特点:具有连续变化的特点,弯曲,扭曲和线性运动可通过结重构结构来实现;具有柔顺性,结构具有足够的自由度能在受外力作用下变形,并且可以通过改变材料调整结构的柔性;具有可重构性,具有不同的控制模式并且可以适用于不同类型的机器人;以及可扩展性,可以通过改变尺寸和层数来实现结构大小的选择。在实物演示中该机械手也实现了多种类型物品的抓取功能,如图2所示。
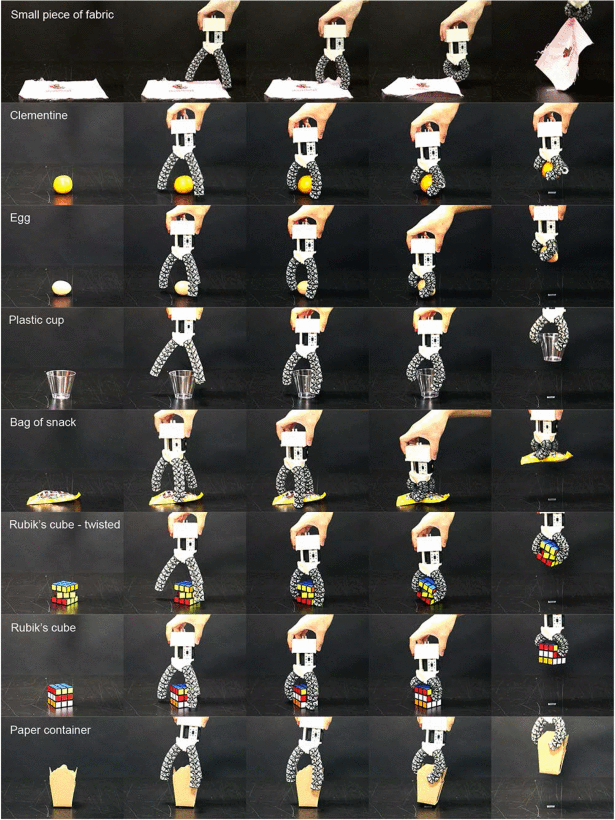
图2 多种类型物体抓取示意图
欠驱动机器人具有巨大的潜力,可以解决传统刚性机器人未满足的需求,例如与环境(或人类)的频繁交互以及对易碎或不规则物体的操纵。但是欠驱动机器人存在缺少设计准则的问题,现有的大多数机器人都有自己独特的设计,不适用于其他类型的机器人或尺寸不同的机器人。该方法的设计原理简单,并借用3D打印技术能够很好地制造出有柔性材料和刚性材料构成的欠驱动柔性机械手。