





供稿人:陈天骄 刘璟璇 供稿单位:机械制造系统工程国家重点实验室 发布日期:2020-09-16
近年来,研究者们独辟蹊径,将生命系统与机电系统相结合,研发用活体肌肉组织或细胞驱动的类生命机器人。类生命机器人具有生命系统的如高能量转换效率和安全性等特点,也具有传统机电系统高强度、高重复性等优势。
2019年PNAS上伊利诺伊大学香槟分校机械科学与工程系的课题组介绍了一个由神经肌肉单元驱动的生物混合机器人。该机器人的身体由独立的软支架、骨骼肌组织和含有运动神经元的干细胞衍生神经簇组成。运动神经元有选择地向肌肉延伸轴突,并对其进行神经支配,形成功能性神经肌肉单位,最后由神经刺激引起的周期性肌肉收缩,驱动鞭毛产生一定的动力,从而为机器人前进提供推力。
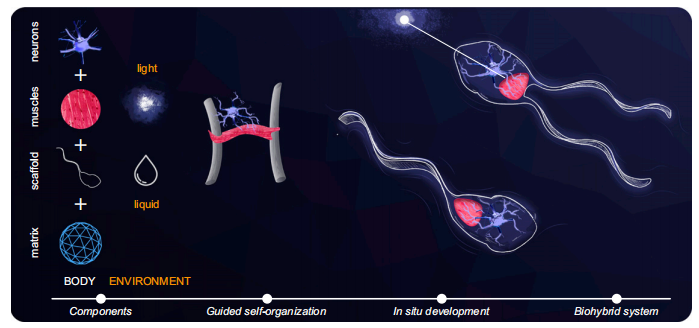
图1 神经肌肉驱动的生物混合机器人
研究人员首先设计了一个生物机械融合系统的软组织支架,他们选用聚二甲基硅氧烷(PDMS)作为支架材料,上面附有重组的细胞外基质(ECM)用于包裹以肌肉和神经元所组成的功能性神经肌肉单位。为了促进神经肌肉单位的原位发育,研究者将来源于干细胞的神经簇和肌细胞一起嵌入到ECM凝胶中用于形成肌肉组织和神经肌肉接头(NMJ)。
在独立的软组织支架上进行原位神经肌肉发育时,首先要构建一个神经肌肉执行器,作为生物杂交设计的框架。因为NMJ模型只在平坦的基板上或3D但永久锚定的支架上得到证实,所以研究者先设计了一个独立的PDMS支架测试平台,通过形状设计来使肌细胞形成收缩性的肌管,通过定向分化光遗传来形成对光敏感的运动神经元,并且神经元的轴突生长明显偏向于肌肉细胞。通过实验证明,在肌肉组织和神经元之间形成了功能性的神经肌肉接头。

图2 生物融合系统时间轴
接下来研究人员对该机器人的物理模型进行了计算,并且选用了仿生鞭毛作为动力来源。在考虑流体和软弹性结构之间的非线性相互作用时,利用计算模型来对实验数据进行仿真模拟,找出了不同组件参数的最佳取值并确定了双尾的实验设计。
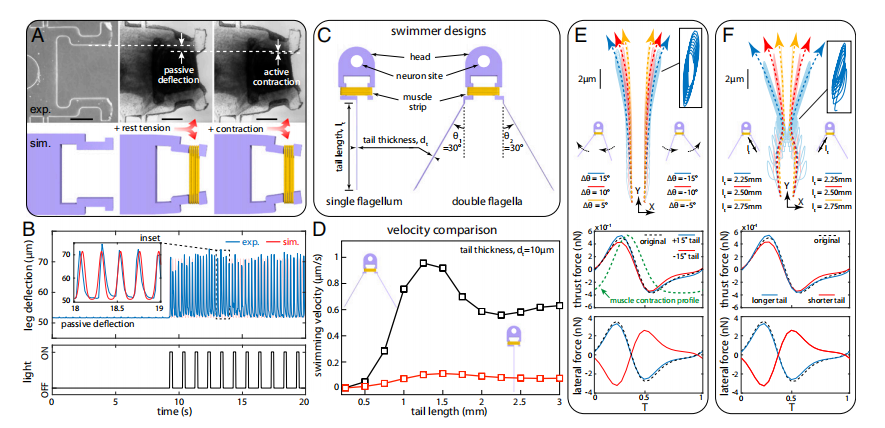
图3 计算建模和设计
最后研究人员利用Z-stack图像对机器人进行实际测试,在高密度液体培养基中释放机器人并用光刺激神经元来驱动肌肉进行可控运动。多次实验结果表明尽管速度缓慢,实验机器人依旧产生了稳定运动,实验还表明在于多次刺激后运动时间和距离会缩短,这表明运动能力能够持续维持的持续时间可能受到神经递质囊泡释放和肌肉代谢动力学的限制。
该课题组实现了将神经-肌肉控制系统整合到生物融合机器人中,并且成功演示了机器人的神经肌肉驱动,这为开发模式化的生物机械融合开辟了新的道路。该类生命体机器人展示了一个多细胞工程生物系统,这个系统是通过自上而下的工程设计和自下而上的自我组织和发展的综合而开发的。指导支架设计的一般原则和与过程中协同工作的组织培养技术的方法,在实现未来的生物杂交和生物融合系统方面被证明是有效的。而具有感觉-运动能力的生物混合系统可以作为破译具体化感知和行动机制的平台,从而不仅可以在机器人制造,甚至生物工程和医药等领域带来新的进步。