





供稿人:杨帆、高琳 供稿单位:机械制造系统工程国家重点实验室 发布日期:2020-04-03
目前,人类创造新生命体的能力仅限于在体外改变现有的生物体或生物工程类有机物。近期,美国佛蒙特大学、塔夫茨大学的研究团队在这一技术层面取得了重大突破,研究人员将计算设计与生物制造相结合,利用非洲爪蟾的皮肤和心肌细胞,制造了能自主运动、实现物体操纵、物体移动和集体行为的微型机器人。
研究人员在确定一个行为目标(如最大化位移)后,运用进化算法创建一个将生物构建块组合在一起以实现所需行为的初始随机总体。在基于物理的虚拟环境中模拟每个设计并自动分配性能分数,通过对收缩细胞随机相位调制的鲁棒性,对性能设计进行筛选,性能较差的设计被删除,并被性能较好的设计的随机修改副本覆盖。接着,使用发育中的非洲爪蟾心肌细胞和表皮细胞组成在生物构建块,将其置于培养皿表面,观察行为,与设计预测的行为进行比较。将其在虚拟环境和体内行为之间的差异以限制设计类型的形式返回到进化算法,在之后的设计制造周期中进化,重复此过程可获得多样化且具有较高性能的设计方案。
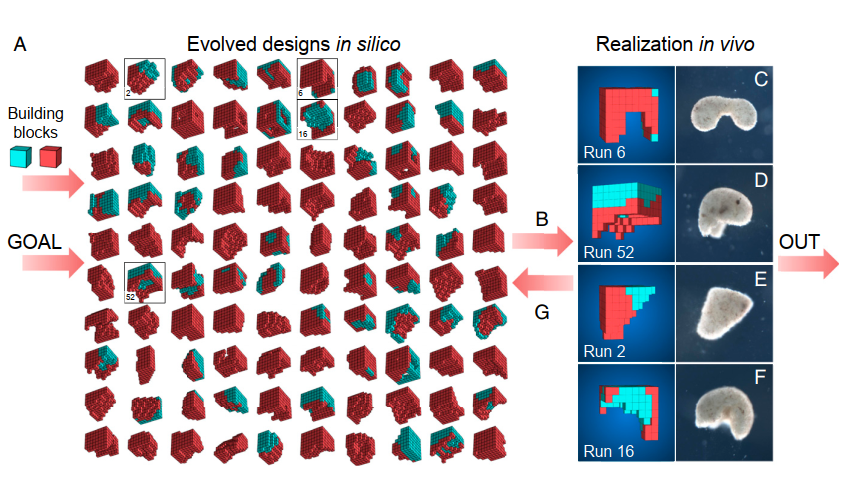
图1.设计制造过程(红色部分代表可收缩的心肌细胞,青色部分代表表皮细胞。)
这种活体机器人由于使用了生命体的细胞而具有良好的自组织和自我修复特性。尽管缺乏神经系统,但心肌细胞之间的自发协调会产生一致的、相位匹配的收缩,不同的设计之间可以相互关联、相互协调,自发聚集,这有助于在物理实现的设计中移动。它不仅能自我维持其外部强加的结构,而且还能在受到损伤时进行自我修复,而人工材料制造的机器则不具备有这一功能。在机器人模型设计方面,进化算法的不断优化,可以对构建元素进行模块化添加、删除或重组,以便为新任务进行快速设计和部署。
考虑到这种微型机器人的无毒性和有限的寿命,可以用作一种新型的智能药物递送或内部手术工具。若在此基础上增加表达信号通路和蛋白质的酶及机械变形功能,就能寻找和消化有毒物质或废物,或识别机器人无法进入的物理环境中的分子。在生物医学方面中,可以利用由病人自身细胞制造的生物机器人清除动脉壁上的斑块,识别癌症,或在体内患病部位进行监控。随着在机器学习、软体模拟和生物打印等技术方面的进步,未来可应用的领域也会更加广泛。