





供稿人:马璇璇 李宏伟 供稿单位:机械制造系统工程国家重点实验室 发布日期:2019-05-07
目前世界各地已经开发了大量用于操纵刚性和非刚性物体的工业夹持器(见图1(a-f))。这些机器手大多只能使用单一的抓取模式,通常是两点捏握或三点捏握。与传统机器手不同的是,新型多指机器手可以采用多种抓取模式,完成的任务范围更广。近年来,工业和学术界为了再现人手的功能已经开发出了各种具有不同程度拟人化的机械手(见图1 (g-l)) 。针对多指机器人手的设计研究不断涌现。
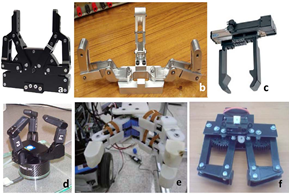
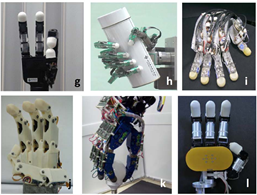
图1.(a)机器人夹持器 (b)柔性机器人夹持器 (c)舒克双爪夹持器(d)简单控制的机械手(e)家用服务机器人夹具(f)自动摩擦钳(g)拟人化机械手(h)Gifu Hand III (i)使用超声波电机的机器人手(j)元泽大学机械手(k)SKKU IV机器人手(l)KU混合动力手
来自Nazarbayev University(NU)的HA Varol等人利用3D打印实现了能够执行人手操作基本功能的NU手(见图2和图3)。NU手的低成本制造是该系统的主要设计要求之一,为了满足这一要求,研究者使用3D打印技术来实现手部的设计制造。具体地,NU手是一个完整的3D打印体,3D打印技术的应用使得该手的设计和制造省去了紧固件和轴承组装件的应用,不但减少了零部件数量而且还并减少了重量。
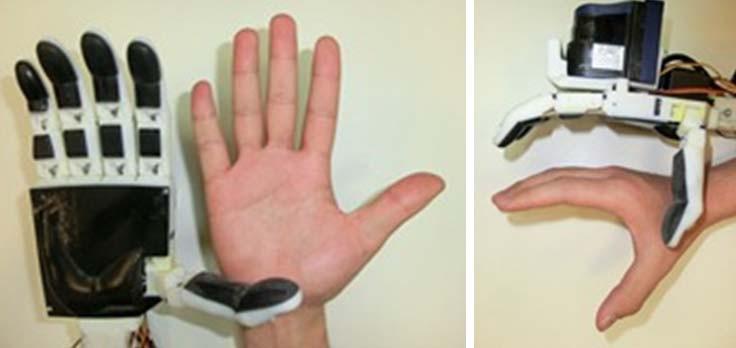
图2.NU手的原型与一个平均大小的男性的手相比


图3.NU手可实现的不同动作
需要指出的是,该手还包含了类似于人手软组织的手指和手掌(3D打印橡胶材料),以帮助进行适形抓取。该手还包含一系列弹性元件,它们将施加的力分布在3个手指之间——中指、无名指和小指,并提供广泛的力控制。弹性元件与肌腱串联,如图4所示,串联弹性元件通过采用3D打印可实现不同弹性系数的数字橡胶材料。与此同时,NU手的手掌、手指和橡胶垫片也是作为一个统一的组件在同一时间打印出来的,没有使用紧固件或轴承。该手还包含一个安装适配器,便于连接工业机器人。
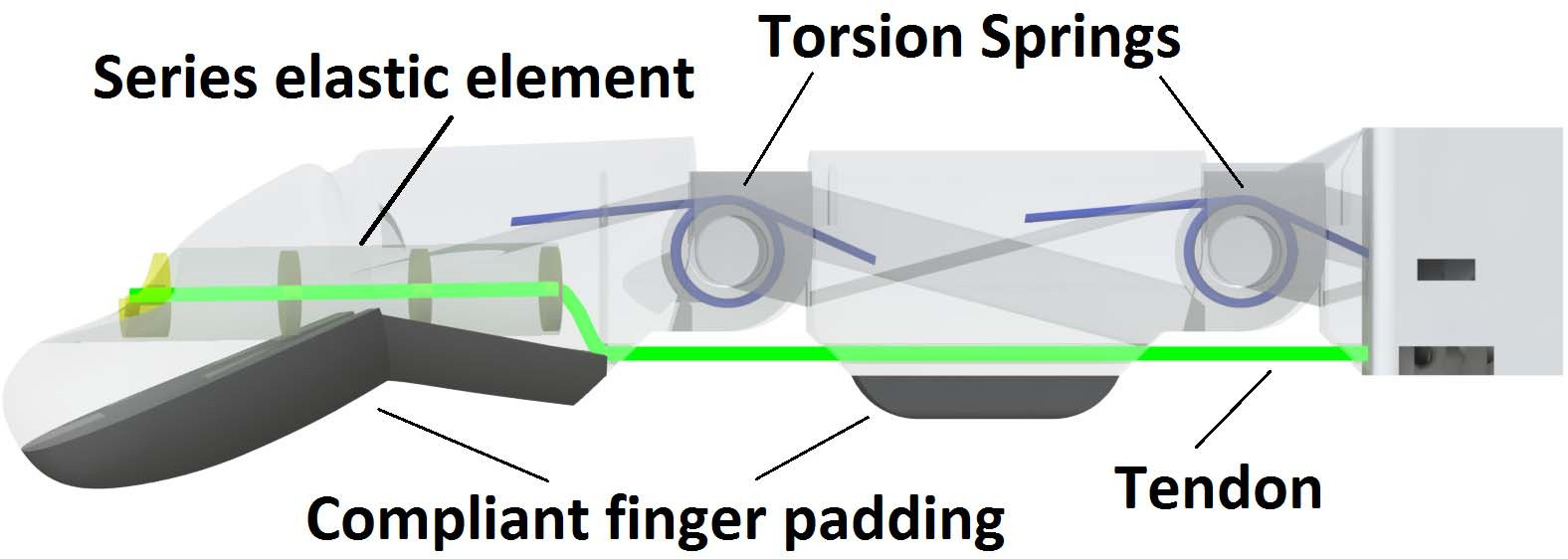
图4.NU手的食指横截面视图,显示肌腱的路线,系列弹性元件,扭转弹簧和顺应的手指填充
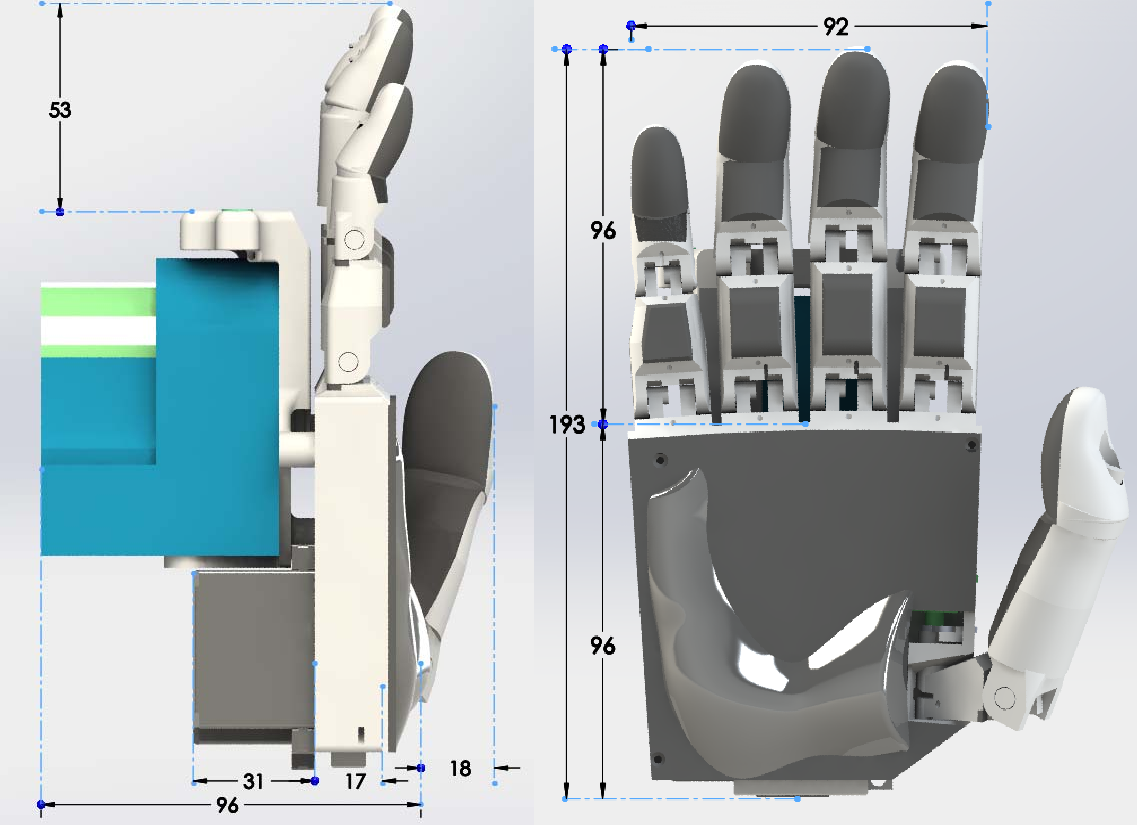
图5.NU手的侧面(左)和底部(右)视图,具有尺寸(所有尺寸都以mm为单位)