





供稿人:尚振涛、田小永 供稿单位:机械制造系统工程国家重点实验室 发布日期:2019-01-12
可伸缩应变传感器作为软体机械的接口,为医疗监控、康复辅助、软外骨骼设备和软体机器人提供了重要的机械状态信息检测手段。基于二维平面薄膜的可伸缩应变传感器已经被广泛研究并用于检测位于传感器平面内的应力,为了获得更全面的机械信息,更需要检测传感器所在平面外部的相互作用引起的面外力信息,如图1。

图1 传感器检测的面内力和面外力
南洋理工大学的研究人员研制出一种利用3D打印技术和碳纳米管的毛细作用与自固定作用的可伸缩应变传感器来检测面外应力[1]。三维结构传感器具有很强的可拉伸性能、多重应变检测和应变方向识别等功能。
如图2,作者首先对可伸缩传感器进行机械结构的设计,通过在传感器根部引入梯形过渡区域、降低传感器和基板的壁厚、提高传感器棒状部分的刚度等策略增大传感器的应力集中系数和应变值高于0.1%区域的面积,进而提高传感器的灵敏度和传感信号的稳定性。
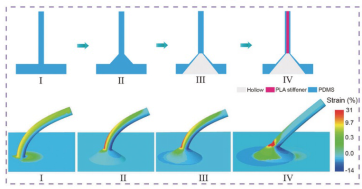
图2 基于能量守恒和经典弯矩理论的传感器机械结构优化
作者用FDM(熔融沉积成形)3D打印工艺制备出聚乳酸基板作为成形模具,然后在表面旋涂一定厚度的PDMS(聚二甲基硅氧烷),将制备好的碳纳米管/去离子水溶液涂敷在传感器根部的圆锥面上,再在传感器底部固定若干碳纳米管圆环,采用五点封装法对传感器进行封装,如图3所示。
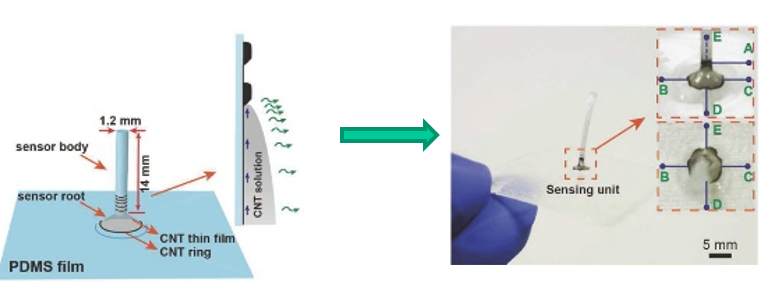
图3 五点封装的可伸缩应变传感器单元结构示意图
对于制备好的传感器,将传感器根部依据应变情况划分为四个区域(图4):拉伸区(ⅰ)、压缩区(ⅲ)、混合区(ⅱ、ⅳ)。作者测试了四个区域在传感器棒状部分产生不同弯曲角度时的电阻值,验证了该传感器的压阻效应。为了获得传感器的耐久性和稳定性特征,进行了传感器拉伸、压缩区域的应力循环加载实验,如图5。
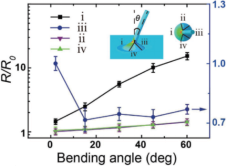
图4 传感器发生不同角度弯曲时四个区域对应的归一化电阻值(R为产生应变后的电阻,R0为不发生弯曲时的电阻)
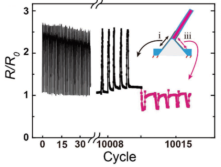
图5传感器的循环应变加载实验
作者在不同流速的氮气气流中检测了传感器的电阻变化(图6),结果显示氮气流速从1m/s增加到11m/s,归一化电阻变为原来的10倍左右,说明传感器具有较大量程和良好的灵敏度。
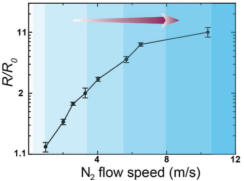
图6 不同氮气流速下传感器的归一化电阻
该传感器易于集成并可用于检测多重应变和微流体的流动,还可以监测包括流速、阻尼振动、准静态力平衡和流动状态等复杂流动的细节。使用3D打印和溶液基体材料可以实现成本控制和传感器的规模应用,该三维结构可伸缩传感器的概念和相关设计原理也为探索人工电子皮肤和柔性电子设备开辟了道路。