





供稿人:赵廷泽 连芩 发布日期:2018-10-07
基于细胞的软体机器人设备可能会对我们设计能够动态感知和响应大范围的复杂环境信号的机械和系统的能力产生革命性的影响。2014年美国伊利诺依大学香槟分校Caroline Cvetkovic等人展示了首个利用哺乳类工程骨骼肌组织驱动的生物机器人在外部电场刺激下向前蠕动的情况。图1为电场刺激频率分别为1Hz、2Hz和4Hz下生物机器人的移动情况。
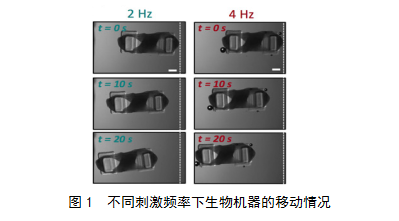
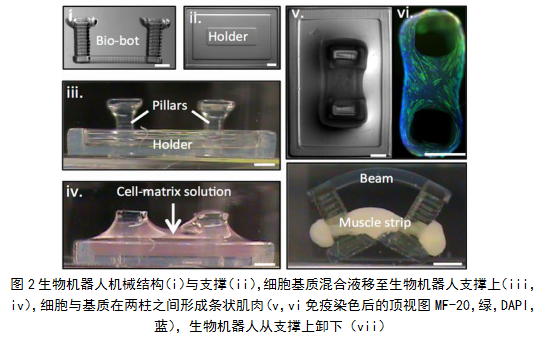
图2所示的机械结构使用PEGDA水凝胶材料,并通过光固化3D打印成型。小鼠骨骼肌细胞、纤维蛋白、基质胶(Matrigel™)等制成的混合物覆盖在PEG结构的两柱上,并通过体外培养技术得到肌组织与机械结构结合的生物机器人。当该生物机器人平行置于20V、脉冲宽度50ms的不同频率电脉冲环境中,电场的刺激使得肌细胞收缩,带动生物机器人向前蠕动,见图1。
这个运动可控的厘米级生物机器人,具有一定的弹性和活性成分,能够对环境和外部施加的刺激做出动态响应,展示了生物材料、组织工程、3D打印以及三种技术相结合的科技产物在未来有着很大的应用前景。