





供稿人:王忠睿 李涤尘 发布日期:2018-06-14
相对于传统的刚性机器人,软体机器人凭借其柔性的特点,在水下探索搜寻等特定环境中体现出适应性强、运动灵活的优势。
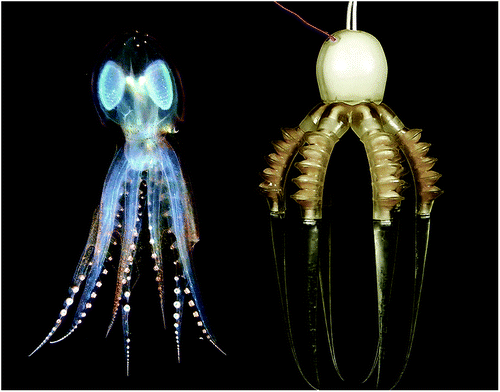
图1 Vitrelladonella章鱼及其仿生软体机器人
对于水下搜寻软体机器人,如何合理设计驱动方式是决定机器人运动性能能的关键。美国俄勒冈州立大学Zatopa团队基于电流变流体设计了一款用于水下探索全软体机器人的液压驱动阀,该团队使用光固化快速成型技术制造阀体主体(如图2所示),借助可溶性支撑精密成型内部细小复杂结构,以电流变流体作为工作介质,以镓铟锡液态合金作为电极材料。驱动阀整体质量不足10g,保压能力超过170kPa,射流流量大于8mL/min。
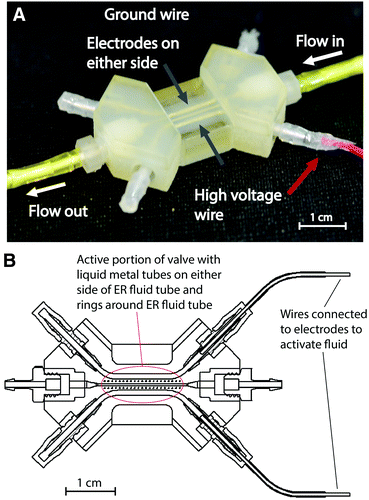
图2 利用3D打印技术制造的电流变流体液压驱动阀
为测试阀体的性能,该团队同样利用光固化材料3D打印制造了软体机器人零件并组装为一只六爪章鱼型软体机器人(如图3所示)用于测试。测试结果显示,在各设定模式下,阀腔内压强达到预期,阀体未因强度不足而出现损坏。
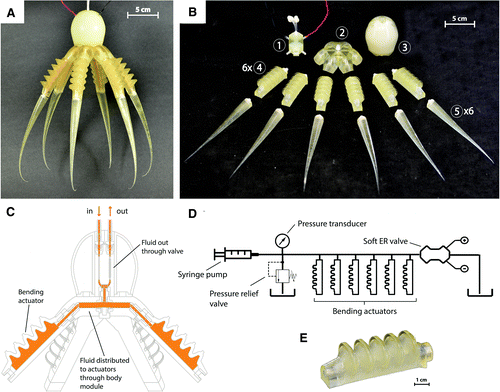
图3 3D打印制造六爪章鱼型软体机器人及测试结果
3D打印技术大大提升了细小复杂零件的制造能力和制造效率,随着软体机器人设计中越来越多的刚性零件被柔性零件取代,零件的复杂性将大大增加,3D打印技术也将在软体机器人设计与制造中大显身手。