





供稿人:尚振涛 田小永 发布日期:2017-12-13
从古至今人类就一直在向大自然学习,可以说“仿生”推动人类的不断进步。仿生学就是人们研究生物体的结构与功能工作的原理,并根据这些原理发明出新的设备、工具和科技,创造出适用于生产,学习和生活的先进技术。
近期,《科学·机器人学》(Science Robotics)杂志报道刊登北京航空航天大学文力副教授课题组牵头、与哈佛大学科研团队合作的最新研究成果——仿生䲟鱼软体吸盘机器人。
浩瀚的海洋里有一种身体细长的䲟鱼,漫长的进化使它的第一背鳍变成吸盘,可以吸附在船底和鲨鱼、鳐鱼、鲸鱼等其他形体较大的鱼身上远游和索食,被形象地称为“搭顺风车”。图1清楚地展现了鱼吸盘的组成和微观结构,利用环扫电镜、Micro CT、高速相机同步运动追踪等生物测量手段,获得了䲟鱼吸盘的宏观与微尺度结构、运动模式。䲟鱼头部吸盘主要由三部分组成:吸盘外周的唇圈,由柔性的肌原纤维组成,能产生负压;吸盘内部的硬质鳍片结构,外表包裹厚度约500微米的软组织,可由肌肉驱动产生法向微动;鳍片上的锥状小刺结构,底部直径约200微米,顶端为1-5微米。
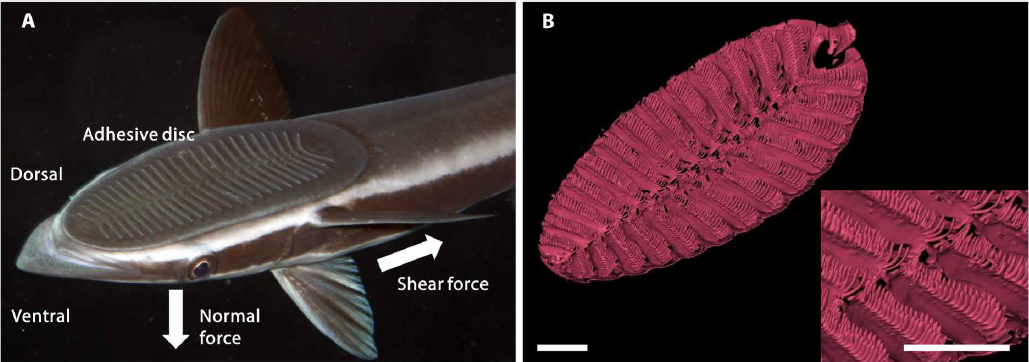
图1 鱼头部吸盘的生物结构。(A)鱼头部实体结构,(B)基于microCT扫描数据的鱼吸盘三维重建模型
该团队先后共克了三大难关,第一个难关是吸盘的制作。吸盘结构精妙,材质硬软兼具,该团队想到了3D打印技术,但常规的单一材料3D打印无法制造出吸盘变刚度的结构,如果只是简单地把硬质软质结构拼接起来,应力强度一大就会迅速疲劳并破碎。
课题组借鉴参考了多种脊椎动物的机体连结结构,利用复合多材料3D打印技术实现一体化样机成形,制造出包括唇圈、软组织等在内的吸盘样机整体结构,其杨氏模量逐级梯度地跨越了3个数量级。
第二个难关如图2是复制鳍片上精微的锥状小刺结构。该团队与哈佛大学合作,利用高精度激光加工技术制作了碳纤维硬质小刺(底部直径270微米)嵌入到复合材料的样机鳍片中,如图3。
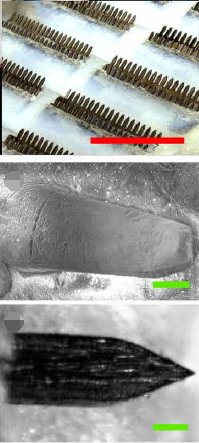
图2 鳍片上单根硬质小刺的显微结构
第三个难题是机器人的驱动机构。该团队用轻量化、防水的软体纤维增强的直线驱动器驱动,实现了䲟鱼吸盘内部鳍片的微动,如图3。
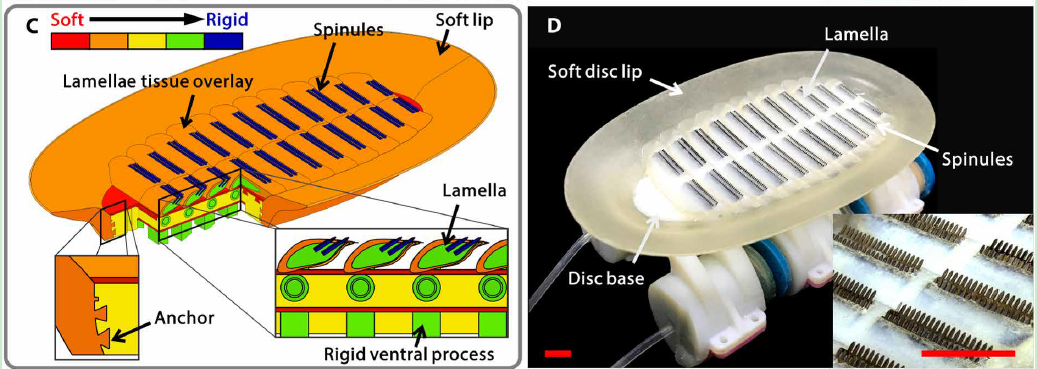
图3 (C)仿生鱼洗盘CAD模型,(D)仿生鱼吸盘原型实物
课题组做出的仿生䲟鱼软体吸盘机器人样机,能在光滑表面产生相当于自重约340倍、粗糙表面上自重约100倍的吸附力。首次揭示了吸盘内部鳍片的主动抬起运动可显著增大吸盘与吸附表面的摩擦力,鳍片上硬质小刺和软组织的协同作用使吸盘能够适应不同粗糙度的表面等机理。为未来的低功耗水下仿生软体机器人、水下吸附装置提供了新的思路。基于生物体机制,这种机器人吸附力可观,也不会对吸附表面造成破坏。该项应用在国防科技,水下救援、海洋生态检测等军民领域都有良好的应用前景。